کنترل پس خور ( Feed Back Control) :
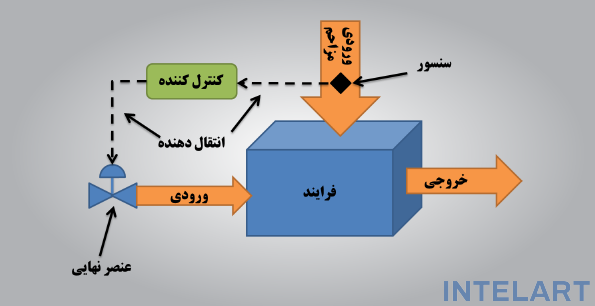
همانطور که در شکل زیر مشاهده میکنید در کنترل فیدبک اطلاعات مربوط به خروجی سیستم توسط سنسور ها و انتقال دهنده ها به سمت عقب برگشت داده میشود و به کنترل کننده وارد می شود.کنترل کننده پس از تحلیل اطلاعات ورودی تصمیم میگیرد و سپس آن را توسط انتقال دهنده به عنصر نهایی کنترل یا همان محرک یا همان وروردی فرایند منتقل میکند و محرک(ها) به نوبه خود روی خروجی سیستم تاثیر میگذارند.
کنترل فیدبک متداول ترین نوع کنترل است و بسیاری از کنترلرهای صنعتی بر همین اساس کار میکنند.
پس کنترل فیدبک بر اساس اندازه گیری خروجی زمان حال و تصمیم گیری بر اساس این اندازه گیری سیستم یا فرایند را کنترل میکند.
قبلا در مورد انواع ورودی ها گفتیم که دو نوع متغیر ورودی داریم:نوع اول که قابل اندازه گیری بود و نوع دوم که به طور مستقیم قابل اندازه گیری نبود و میتوانست بر حالت سیستم تاثیر بگذارد که به نام ورودی مزاحم (Disturbance) شناخته می شود.
خب حالا تصور کنید که از کنترل فیدبک استفاده کردیم و ورودی مزاحم به سیستم اعمال می شود در چنین حالتی سیستم به اصطلاح دچار آشفتگی (Upset) میشود. سیستم کنترل بعد از اندازه گیری خروجی و تشخیص اینکه خطایی رخ داده با اقدام مناسب خودش دوباره سیستم را اصلاح میکند و به حالت مورد نظر ما می رساند.
پس در کنترل فیدبک تصمیم گیری بعد از اتفاق افتادن (After The Fact) شروع میشود.
در زیر ساختار کنترل فیدبک را مشاهده میکنید:
 کنترل پیشرو (Feed Forward Control) :
کنترل پیشرو (Feed Forward Control) :
در این نوع کنترل کننده ورودی مزاحم به طور مستقیم اندازه گیری میشود و قبل از اینکه بتواند روی فرایند تاثیر منفی بگذارد یا به اصطلاح فرایند را دچار آشفتگی کند، کنترل کننده فرمان لازم را برای محرک ورودی میدهد تا اثر ورودی مزاحم را خنثی کند.
به این نوع کنترل کنترل پیشرو گفته میشود. همانطور که در شکل مشاهده میکنید جلوی ضربه اصلی ناشی از عمل ورودی مزاحم در خروجی گرفته میشود.
ویژگی اصلی این نوع کنترل این است که هیچ اطلاعاتی در مورد خروجی یا وضعیت تنظیمی خروجی فرایند نداریم.
شاید از معایب این نوع کنترل وابستگی شدید به مدل سیستم هست که البته همیشه مدل سیستم در دسترس نیست.همانطور که ذکر شد در این نوع کنترل هیچ اطلاعاتی از خروجی فرایند در دسترس نداریم.مشکل دوم این است که این نوع کنترل وقتی کارساز است که ورودی مزاحم قبل از ورود به سیستم اندازه گیری شود در غیر اینصورت هیچ تاثیر مثبتی نمیتوان از این نوع کنترل انتظار داشت.
در شکل زیر ساختار کنترل پیشرو را مشاهده میکنید:
 کنترل حلقه باز (Open Loop Control) :
کنترل حلقه باز (Open Loop Control) :
بر خلاف دو حالت قبل در این نوع کنترل هیچ گونه حلقه ای تشکیل نمیشود، تصمیم ها و فرمان های کنترلی بر اساس اطلاعات گرفته شده از خروجی نیست ، بلکه این محاسبات بر اساس محاسبات ، عملکردهای داخلی و همچنین اطلاعات اولیه از فرایند است.
به این ساختار کنترلی کنترل حلقه باز میگویند .اگر شکل این نوع کنترل را با دوحالت قبلی مقایسه کنید متوجه تفاوت های این نوع کنترل با قبلی ها می شوید.
نکته : باز بودن حلقه کنترل دلیلی بر عدم کارایی این نوع کنترل نیست
مثلا هیترهای معمولی ، کوره های معمولی ، فرایندهای تایمری ، این ها همگی از کنترل حلقه باز استفاده میکنند.
تصویر زیر ساختار این نوع کنترل را نشان میدهد :
 مباحث دیگر در باب سیستم های کنترل :
مباحث دیگر در باب سیستم های کنترل :
در سیستم های کنترل برخی از متغیرهای خروجی از اهمیت خیلی زیادی برخوردار هستند و باید همیشه در مقادیر خاصی که مثلا از جانب کاربر تنظیم میشود نگه داری شوند.یکی از اهداف اصلی کنترل همین ثابت نگه داشتن متغیرهای خروجی در مقادیر مد تنظیم شده است که البته این کنترل میتواند دستی یا اتوماتیک باشد.
پس تغییر متغیرها میتواند ناشی از دو مورد زیر باشد :
1- به علت تاثیر ورودی مزاحم
2- تغییر نقطه تنظیم توسط کاربر یا اپراتور
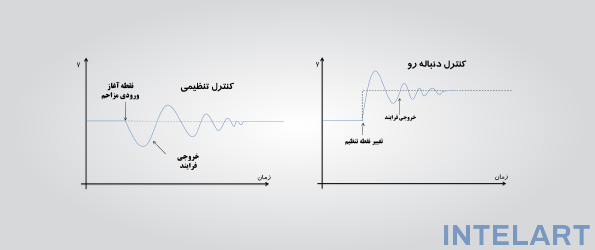
وقتی از کنترل تنظیمی (Regulary Control) صحبت میشود منظور این است که سیستم کنترل باید بتواند اثر ورودی مزاحم را خنثی کند و سیستم را در حالت تنظیم شده پایدار کند.از طرف دیگر هدف کنترل دنباله رو این است که اگر نقطه تنظیم توسط کاربر تغییر کرد بتواند در کمترین زمان ممکن تغییرات را دنبال کند و متغیر(های) خروجی را در این نقطه تنظیم شده نگه دارد.
تصویر زیر را ببینید:
طرح یک مثال :
تصور کنید که قراره دمای یک محیط بسته را کنترل کنیم.
این محیط بسته میتواند مبدل یک کوره صنعتی بخار آب یا هرچیز دیگری باشد.
1- خب قدم اول اینه که ببینیم به چه سیستم کنترلی نیاز داریم؟آیا اصلا با کنترل مساله حل میشود؟
2- قدم دوم اینه که متغیرهای کنترل را پیدا کنیم.البته متغیرهایی که در بهبود شرایط سیستم تاثیر دارند.(قبلا هم ذکر شد که بعضی از متغیرها هستند که امکان دسترسی مستقیم به آن ها وجود ندارد).
خب میتوان با جواب دادن به این سوال ها متغیرهای مناسب رو پیدا کرد :
کدام متغیرهای خروجی تعیین کننده هستند و میتوانند در بهبود شرایط سیستم و رسیدن به هدف نهایی موثر ظاهر باشند؟این ها متغیرهایی هستن که باید برای تصمیم گیری صحیح اندازه گیری بشوند.خب واضحه که در این سیستم دمای کوره یک متغیر مناسب هست.متغیرهای دیگری هم مثل فشار بخار خروجی ، دبی خروجی و از این قبیل وجود دارند که با داشتن آن ها میتوانیم یک سیستم کنترلی خیلی خوب طراحی کنیم ولی اینجا و در این مورد متغیری که از همه مهمتر هست دمای آب خروجی هست.
3- پیداکردن مهمترین ورودی ها . خب این دفعه هم چندین متغیر ورودی هست که میتوانند بر شرایط حاکم بر سیستم تاثیر بگذارند مثل : دمای آب ورودی به کوره ، میزان سوخت ورودی به کوره ، میزان هوای ورودی به مشعل کوره ، دبی آب ورودی به کوره و ...
سوال: از بین موارد بالا کدام یک ورودی مناسب و کدوم یک ورودی مزاحم هست ؟
جواب : میزان سوخت و هوای ورودی به مشعل از جمله متغیرهای ورودی هستند که میتوان توسط آنها خروجی را به نحو قابل قبولی کنترل کرد و دبی و دمای آب ورودی هم متغیرهای مزاحم هستند.
4- انتخاب روش کنترل مناسب. باید با توجه به ماهیت مسئله کنترلی مد نظر ، یک متد مناسب (فیدبک ، پیشرو ، حلقه باز و ...) انتخاب کنیم.(البته در پست بعدی در مورد این ساختارها توضیح بیشتری خواهیم داد)
5- طراحی کنترل کننده که میتواند با درجه مهارت های مختلفی اجرا بشه.خب این مورد خیلی مهم هست چرا که باید با درنظر گرفتن متغیر هایی که در بالا ذکر شد ، یک ساختار مناسب را انتخاب کنیم تا از طریق تنظیم متغیرهای ورودی بتوانیم تصمیم قابل قبولی جهت کنترل سیستم بگیریم.
پس داشتن یک درک صحیح از قواعد دینامیکی و ساختار سیستم میتواند به طراحی یک سیستم کنترل بهینه کمک شایانی بکند.
برخی نکات مهم :
مبحث کنترل آن گونه که میپندارید ساده و راحت نیست.در عمل مشکلات بسیار زیادی در روبه روی ما قرار دارد.از آنجایی که هدف ما پیاده سازی مناسبترین کنترل کننده است باید این موارد را هم در نظر بگیریم :
1- غیر خطی بودن فرایند : بسیاری از مدل هایی که در کتاب ها هستند و یا ما آن ها را برای آنالیز انتخاب میکنیم خطی هستند ولی واقعیت موجود چیز دیگری است.در عمل بسیاری از فرایندها در پیوستار غیر خطی هستند و طرح مسئله کنترل در این موارد پیچیدگی های زیادی را از جمله خطی سازی و ... در مقابل ما قرار میدهد.
2- خطاهای مدلسازی : ممکن است بتوانیم برای چند فرایند ساده عمل خطی سازی را با دقت بالا و بدون خطا انجام دهیم ولی در واقعیت سیستم ها گاهی آنقدر پیچیده هستند که هرگز خطی سازی ما آن دقت مورد نیاز را نخواهد داشت و باید این خطا به نحوی در فرموله کردن سیستم کنترل لحاظ شود وگرنه خروجی سیستم کنترل ما آن چیزی نخواهد بود که انتظار داریم !
3- سایر مشکلات اجرایی : واقعیت این است که در اجرا محدودیت ها بیشتر از آن است که فکرش را میکنیم. به عنوان مثال اگر در کاربردی بخواهیم دمای سیال عبوری از یک لوله را اندازه بگیریم باید این را هم در نظر بگیریم که اجسام اطراف لوله هم بر روی دمای سیال تاثیر میگذارند! یا مثلا ممکن است تاثیر گذاشتن رو یک متغیر باعث تغییر در متغیر دیگری شود و آن هم به نوبه خود با عث تغییر در متغیر دیگر!
گاهی اوقات نیز تاخیر زمانی از مشکلات جدی میباشد.فرض کنید که در یک خط طویل یک متغیر را تغییر میدهید ولی این تغییر بلافاصله در انتهای خط دیده نمیشود.باید فکری به حال تاخیر هم کرد!
حتی اگر یک طراحی کامل و دقیق داشته باشیم باز هم عواملی نظیر خطای سنسور ، خطای ترنسمیتر ، اینرسی شیرهای کنترل و عوامل دیگر مشکلات دیگری را بر سر راه ما میگذارند.
4- ساختارهای فرایند پیچیده : در مثالی که در بالا ارائه شد تعداد ورودی خروجی کم بود.اما در بسیاری اوقات تعداد متغیرها خیلی بیشتر بوده و روابط بین آن ها پیچیده است.که البته در این موارد میتوان فرایند پیچیده را به چند فرایند ساده تر تقسیم کرد که در این صورت مطالعه فرایند ساده تر میشود.