در این تاپیک به بررسی و مرور اصول کنترل و ساختار PIDها پرداخته خواهد شد.
همراهان عزیز توجه داشته باشید یادگیری این اصول به همراه تسلط بر جزئیات و چگونگی کارکرد PID های INTELART (به طور مثال PID_STD) به شما در پیاده سازی الگوریتم های کنترلی در انواع فرایندهای صنعتی کمک شایانی خواهد کرد.
آموزش اصول کنترل و PID ها
-
mahdi.faani

- مدیر انجمن

- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
نگاه کلی به یک مساله کنترلی (تئوری و صنعتی) و بحث پیرامون متغیرهای کنترلی
امروزه در بسیاری از فرایندها (چه صنعتی و چه خانگی) مبحث کنترل از جایگاه ویژه ای برخوردار شده است ، چراکه با داشتن یک سیستم کنترل خوب میتوان :
1- از داشتن عملکردی ایمن در سیستم و فرایند اطمینان حاصل کرد
2- میتوان نرخ تولید (در فرایندهای صنعتی) را همواره در حد انتظار نگه داشت
3- میتوان محصول نهایی را با کیفیت مناسبی ارائه کرد
موارد ذکر شده در بالا اصول حاکم بر داشتن یک عملکرد موفق در سیستم های صنعتی هستند.که البته لازمه آن داشتن یک سیستم کنترل مناسب است.
برخی ملاحظات ایمنی را میتوان به مورد اول مربوط کرد که در مثالی که در ادامه ارائه میشود مورد بحث قرار خواهد گرفت.
یک سیستم کنترل باید بتواند میزان محصول تولیدی چه از لحاظ کمی و چه از لحاظ کیفی را در حد مطلوب نگه دارد.
بنابراین میتوان دو وظیفه اصلی برای یک سیستم کنترل در نظر گرفت :
1- نشان دادن وضعیت فرایند به کمک برخی از اندازه گیری متغیرها (Monitoring )
2- قابلیت اعمال تغییر در متغیرهای فرایند به منظور بهبود شرایط سیستم برای رسیدن به هدف نهایی (Control )
متغیرهای یک فرایند
در سیستم هایی که مسئله کنترل وجود دارد کمیت هایی از نوع ورودی یا خروجی مانند : دما ، دبی ، فشار ، سرعت یا ترکیبی از اینها وجود دارد که به آن ها متغیرهای فرایند (Process Variables) یا حالت سیستم گفته می شود .این متغیرها از اهمیت ویژه ای برخوردار هستند چون روی فرایند تاثیر میگذارند و باید تعریف شوند :
1- متغیرهای ورودی : متغیرهایی هستند که به طور مستقل میتوانند سیستم را تحریک کنند یا تغییراتی را در شرایط درونی آن ایجاد کنند.متغیرهای ورودی خود به دو نوع تقسیم می شوند:
1- متغیرهایی که به آسانی قابل دسترسی هستند و از آن ها میتوان برای تغییر در شرایط حاکم بر سیستم استفاده کرد که به متغیر های کنترل (Manipulated Variables) مشهور هستند.
2- متغیرهای ورودی مزاحم (Disturbance) که روی آن ها هیچ کنترلی وجود ندارد ولی میتوانند شرایط سیستم را تغییر دهند.(در آینده خواهیم گفت که چگونه به طور غیر مستقیم اثر ورودی مزاحم را کم کنیم)
2- متغیرهای خروجی : متغیرهایی هستند که ویژگی و اطلاعاتی را در مورد حالات داخلی فرایند میدهند.
3- متغیرهای حالت : حداقل تعداد متغیرهایی هستند که حالات یا شرایط کنونی سیستم را میتوان به وسیله آن ها بیان کرد که البته در مبحث مورد نظر ما زیاد با آن سروکار نداریم.
پس متغیر خروجی یا همان متغیری که آن را اندازه میگیریم مقداری متغیر یا ترکیبی از متغیرهای حالت است.
لازم به ذکر است که برخی از متغیرهای سیستم را میتوان به طور آنی (Online) اندازه گیری کرد و برخی از آن ها این قابلیت را ندارند.به همین خاطر اعمال کنترل با استفاده از متغیرهای حالت کمی دشوار است که البته ما در این مبحث خوشبختانه! با آن سروکار نداریم.
با توجه به مطالب بالا میتوان یک مفهوم کلی برای یک سیستم کنترل فرایند ارائه کرد:
سیستم کنترل فرایند یک نهاد مستقل از فرایند است که وظیفه نظارت بر خروجی های فرایند را بر عهده دارد .این سیستم باید بتواند در رابطه با تغییر ورودی برای رسیدن به هدف نهایی ، تصمیم گیری های صحیحی را اتخاذ کند.
پس میتوانیم وظایف یک سیستم کنترل را به سه بخش تقسیم کنیم : (دقت داشته باشید دو موردی که در بالا ذکر شد وظایف اصلی هستند.)
1- نظارت بر متغیرهای خروجی فرایند توسط اندازه گیری آن ها
2- تصمصم گیری های منطقی در رابطه با اینکه چه عملیات تصحیح کننده ای روی حالت های فرایند انجام شود
3- اجرای این تصمیم گیری ها به طور موثر روی فرایند
اگر این تصمیم ها وعملیات به صورت دستی و توسط یک اپراتو انجام شود به آن سیستم کنترل دستی (Manulal Control System ) گفته می شود و اگر این وظایف به طور اتوماتیک و توسط ماشین انجام شود به آن سیستم کنترل اتوماتیک (Automatic Control System)گفته می شود.
ماشین انجام دهنده کنترل می تواند از لحاظ عملکردی ماهیت های متفاوتی داشته باشد. مثلا کنترلر PID پنوماتیکی (که با سیگنال های هوا کار میکند)، کنترلر PID هیدرولیکی، کنترلر PID الکترونیکی. اگر این ماشین که کنترل اتوماتیک را انجام میدهد الکترونیکی و یک کامپیوتر یا به عبارتی PLC باشد به آن سیستم کنترل کامپیوتری گفته می شود. هدف نهایی ما در این تاپیک آشنایی کامل با سیستم کنترل کامپیوتری است.
1- از داشتن عملکردی ایمن در سیستم و فرایند اطمینان حاصل کرد
2- میتوان نرخ تولید (در فرایندهای صنعتی) را همواره در حد انتظار نگه داشت
3- میتوان محصول نهایی را با کیفیت مناسبی ارائه کرد
موارد ذکر شده در بالا اصول حاکم بر داشتن یک عملکرد موفق در سیستم های صنعتی هستند.که البته لازمه آن داشتن یک سیستم کنترل مناسب است.
برخی ملاحظات ایمنی را میتوان به مورد اول مربوط کرد که در مثالی که در ادامه ارائه میشود مورد بحث قرار خواهد گرفت.
یک سیستم کنترل باید بتواند میزان محصول تولیدی چه از لحاظ کمی و چه از لحاظ کیفی را در حد مطلوب نگه دارد.
بنابراین میتوان دو وظیفه اصلی برای یک سیستم کنترل در نظر گرفت :
1- نشان دادن وضعیت فرایند به کمک برخی از اندازه گیری متغیرها (Monitoring )
2- قابلیت اعمال تغییر در متغیرهای فرایند به منظور بهبود شرایط سیستم برای رسیدن به هدف نهایی (Control )
متغیرهای یک فرایند
در سیستم هایی که مسئله کنترل وجود دارد کمیت هایی از نوع ورودی یا خروجی مانند : دما ، دبی ، فشار ، سرعت یا ترکیبی از اینها وجود دارد که به آن ها متغیرهای فرایند (Process Variables) یا حالت سیستم گفته می شود .این متغیرها از اهمیت ویژه ای برخوردار هستند چون روی فرایند تاثیر میگذارند و باید تعریف شوند :
1- متغیرهای ورودی : متغیرهایی هستند که به طور مستقل میتوانند سیستم را تحریک کنند یا تغییراتی را در شرایط درونی آن ایجاد کنند.متغیرهای ورودی خود به دو نوع تقسیم می شوند:
1- متغیرهایی که به آسانی قابل دسترسی هستند و از آن ها میتوان برای تغییر در شرایط حاکم بر سیستم استفاده کرد که به متغیر های کنترل (Manipulated Variables) مشهور هستند.
2- متغیرهای ورودی مزاحم (Disturbance) که روی آن ها هیچ کنترلی وجود ندارد ولی میتوانند شرایط سیستم را تغییر دهند.(در آینده خواهیم گفت که چگونه به طور غیر مستقیم اثر ورودی مزاحم را کم کنیم)
2- متغیرهای خروجی : متغیرهایی هستند که ویژگی و اطلاعاتی را در مورد حالات داخلی فرایند میدهند.
3- متغیرهای حالت : حداقل تعداد متغیرهایی هستند که حالات یا شرایط کنونی سیستم را میتوان به وسیله آن ها بیان کرد که البته در مبحث مورد نظر ما زیاد با آن سروکار نداریم.
پس متغیر خروجی یا همان متغیری که آن را اندازه میگیریم مقداری متغیر یا ترکیبی از متغیرهای حالت است.
لازم به ذکر است که برخی از متغیرهای سیستم را میتوان به طور آنی (Online) اندازه گیری کرد و برخی از آن ها این قابلیت را ندارند.به همین خاطر اعمال کنترل با استفاده از متغیرهای حالت کمی دشوار است که البته ما در این مبحث خوشبختانه! با آن سروکار نداریم.
با توجه به مطالب بالا میتوان یک مفهوم کلی برای یک سیستم کنترل فرایند ارائه کرد:
سیستم کنترل فرایند یک نهاد مستقل از فرایند است که وظیفه نظارت بر خروجی های فرایند را بر عهده دارد .این سیستم باید بتواند در رابطه با تغییر ورودی برای رسیدن به هدف نهایی ، تصمیم گیری های صحیحی را اتخاذ کند.
پس میتوانیم وظایف یک سیستم کنترل را به سه بخش تقسیم کنیم : (دقت داشته باشید دو موردی که در بالا ذکر شد وظایف اصلی هستند.)
1- نظارت بر متغیرهای خروجی فرایند توسط اندازه گیری آن ها
2- تصمصم گیری های منطقی در رابطه با اینکه چه عملیات تصحیح کننده ای روی حالت های فرایند انجام شود
3- اجرای این تصمیم گیری ها به طور موثر روی فرایند
اگر این تصمیم ها وعملیات به صورت دستی و توسط یک اپراتو انجام شود به آن سیستم کنترل دستی (Manulal Control System ) گفته می شود و اگر این وظایف به طور اتوماتیک و توسط ماشین انجام شود به آن سیستم کنترل اتوماتیک (Automatic Control System)گفته می شود.
ماشین انجام دهنده کنترل می تواند از لحاظ عملکردی ماهیت های متفاوتی داشته باشد. مثلا کنترلر PID پنوماتیکی (که با سیگنال های هوا کار میکند)، کنترلر PID هیدرولیکی، کنترلر PID الکترونیکی. اگر این ماشین که کنترل اتوماتیک را انجام میدهد الکترونیکی و یک کامپیوتر یا به عبارتی PLC باشد به آن سیستم کنترل کامپیوتری گفته می شود. هدف نهایی ما در این تاپیک آشنایی کامل با سیستم کنترل کامپیوتری است.
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
ساختار سیستم های کنترلی
بدیهی است که هر سیستم کنترل (حتی کنترل دستی) دارای یک سری سخت افزار برای اعمال کنترل است.
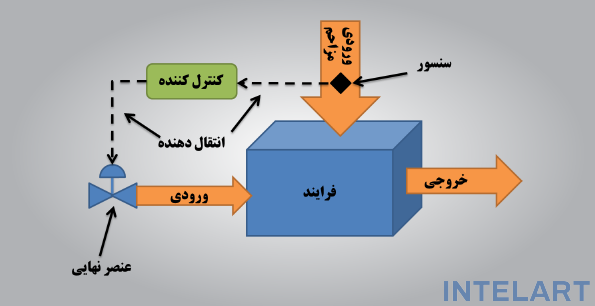
به طور کلی عناصر موجود در هر سیستم کنترل شامل سنسورها (Sensors)، کنترل کننده ها (Controlles)، انتقال دهنده ها (Transmiters) و عناصر نهایی یا محرک ها (Actuators or Final Control Element) هستند.در ذیل در مورد این ها بحث می شود :
1- سنسورها (Sensors): این تجهیزات که گاهی به آن ها عناصر اندازه گیری یا عناصر اولیه گفته می شود در اکثر سیستم های کنترل استفاده میگردند. اطلاعات لازم از متغیرهای فرایند یا حالت سیستم را از طریق همین سنسورها بدست می آوریم.سنسورها برای اندازه گیری کمیت هایی مانند فشار ، دما ، سطح مایع ، دبی ، غلظت ، سرعت ، موقعیت و ... به کار می روند.به عنوان مثال ترموکوپل یک نمونه از سنسور دما است.
2- کنترل کننده ها (Controllers) : عضو تصمیم گیرنده یا قلب یک سیستم کنترل کنترل کننده است.این عنصر تنها عنصر سخت افزاری است که باید هوشمند باشد.(البته بعضی از سنسورهای جدید هم به نوعی هوشمند هستند ، ولی حداقل عضوی که باید دارای هوشمندی باشد کنترل کننده است).عملکرد سخت افزاری یک کنترل کننده میتواند توسط سیگنال های نیوماتیک (Penumatic) که در قالب فشار استاندارد 5 تا 7 bar یا 3 تا 15 psi بیان میشود اعمال گردد.همینطور این سیگنال میتواند یک سیگنال الکتریکی (4 تا 20 میلی آمپر) یا حتی سیگنال فشار روغن (Hydrolic) باشد.کنترل کننده های نیوماتیکی والکتریکی معمولا برای عملیات های ساده به کار می روند و هنگامی که به یک سیستم کنترل پیچیده تر نیاز داشته باشیم سراغ سیستم های کنترل دیجیتال می رویم. PLCها و DCS ها نمونه های پرکاربرد و متداول در فرایندهای صنعتی می باشند.
3- انتقال دهنده ها (Transmitters): اینکه چگونه اطلاعاتی که سنسور از فرایند دریافت میکند به کنترل کننده فرستاده شود وظیفه انقال دهنده است.معمولا خروجی سنسور ها یک کمیت با محدوده خارج از استاندارد صنعتی و همچنین یک سیگنال بسیار ضعیف است.مثلا خروجی یک سنسور دما میتواند در محدوده چند میلی ولت قرار داشته باشد در حالی که استاندارد صنعتی 4 تا 20میلی آمپر است.پس باید یک عضو در کنار سنسور وجود داشته باشد تا حد پایین خروجی سنسور را به یک سیگنال 4میلی آمپر و حد بالای آن را به یکی سیگنال 20 میلی آمپر تبدیل کند. امروزه با پیشرفت صنعت الکترونیک و مدرن تر شدن PLC ها، غالبا به یک ترنسمیتر جدا برای خوانش سنسور نیازی نیست و میتوان توسط Expansion Module های مخصوص طراحی شده توسط سازنده PLC، سنسور را مستقیما به مجموعه PLC متصل کرد. واضح است که در این حالت نیز ماژول متصل شده به PLC نقش Signal Conditioning را انجام میدهد.
4- عناصر نهایی کنترل (Actuators): این عناصر یا همان محرک ها وظیفه اعمال تصمیم های کنترل کننده به فرایند را دارندو فرمان کنترل توسط این عنصر به فرایند اعمال می شود .اکثر عناصر نهایی کنترل شیرهای کنترل هستند که در قالب ها واندازه های مختلف مانند : فن ها ، پمپ های با سرعت متغیر ، کمپرسورها ، نوارنقاله ها و رله ها هستند. انواع دیگری از محرک ها مانند المنت های گرم کننده ، لامپ ها ، المان های خنک کننده و نیز به وفور در صنعت یافت می شوند.
5- عناصر سخت افزاری دیگر : در جریان انتقال اطلاعات بین اجزای سیستم کنترل علاوه بر سخت افزارهای ذکر شده در بالا عملیات دیگری جهت تبدیل اطلاعات نیز باید انجام شود.طبیعتا این تبدیل ها به سخت افزارهای جداگانه ای نیاز دارند.به عنوان مثال فرض کنید که خروجی استاندارد شده یک سنسور دما را میخواهیم توسط کامپیوتر تحلیل کنیم ، به طور قطع به یک نصر ارتباطی بین PLC و کامپیوتر نیاز هست.
به طور کلی عناصر موجود در هر سیستم کنترل شامل سنسورها (Sensors)، کنترل کننده ها (Controlles)، انتقال دهنده ها (Transmiters) و عناصر نهایی یا محرک ها (Actuators or Final Control Element) هستند.در ذیل در مورد این ها بحث می شود :
1- سنسورها (Sensors): این تجهیزات که گاهی به آن ها عناصر اندازه گیری یا عناصر اولیه گفته می شود در اکثر سیستم های کنترل استفاده میگردند. اطلاعات لازم از متغیرهای فرایند یا حالت سیستم را از طریق همین سنسورها بدست می آوریم.سنسورها برای اندازه گیری کمیت هایی مانند فشار ، دما ، سطح مایع ، دبی ، غلظت ، سرعت ، موقعیت و ... به کار می روند.به عنوان مثال ترموکوپل یک نمونه از سنسور دما است.
2- کنترل کننده ها (Controllers) : عضو تصمیم گیرنده یا قلب یک سیستم کنترل کنترل کننده است.این عنصر تنها عنصر سخت افزاری است که باید هوشمند باشد.(البته بعضی از سنسورهای جدید هم به نوعی هوشمند هستند ، ولی حداقل عضوی که باید دارای هوشمندی باشد کنترل کننده است).عملکرد سخت افزاری یک کنترل کننده میتواند توسط سیگنال های نیوماتیک (Penumatic) که در قالب فشار استاندارد 5 تا 7 bar یا 3 تا 15 psi بیان میشود اعمال گردد.همینطور این سیگنال میتواند یک سیگنال الکتریکی (4 تا 20 میلی آمپر) یا حتی سیگنال فشار روغن (Hydrolic) باشد.کنترل کننده های نیوماتیکی والکتریکی معمولا برای عملیات های ساده به کار می روند و هنگامی که به یک سیستم کنترل پیچیده تر نیاز داشته باشیم سراغ سیستم های کنترل دیجیتال می رویم. PLCها و DCS ها نمونه های پرکاربرد و متداول در فرایندهای صنعتی می باشند.
3- انتقال دهنده ها (Transmitters): اینکه چگونه اطلاعاتی که سنسور از فرایند دریافت میکند به کنترل کننده فرستاده شود وظیفه انقال دهنده است.معمولا خروجی سنسور ها یک کمیت با محدوده خارج از استاندارد صنعتی و همچنین یک سیگنال بسیار ضعیف است.مثلا خروجی یک سنسور دما میتواند در محدوده چند میلی ولت قرار داشته باشد در حالی که استاندارد صنعتی 4 تا 20میلی آمپر است.پس باید یک عضو در کنار سنسور وجود داشته باشد تا حد پایین خروجی سنسور را به یک سیگنال 4میلی آمپر و حد بالای آن را به یکی سیگنال 20 میلی آمپر تبدیل کند. امروزه با پیشرفت صنعت الکترونیک و مدرن تر شدن PLC ها، غالبا به یک ترنسمیتر جدا برای خوانش سنسور نیازی نیست و میتوان توسط Expansion Module های مخصوص طراحی شده توسط سازنده PLC، سنسور را مستقیما به مجموعه PLC متصل کرد. واضح است که در این حالت نیز ماژول متصل شده به PLC نقش Signal Conditioning را انجام میدهد.
4- عناصر نهایی کنترل (Actuators): این عناصر یا همان محرک ها وظیفه اعمال تصمیم های کنترل کننده به فرایند را دارندو فرمان کنترل توسط این عنصر به فرایند اعمال می شود .اکثر عناصر نهایی کنترل شیرهای کنترل هستند که در قالب ها واندازه های مختلف مانند : فن ها ، پمپ های با سرعت متغیر ، کمپرسورها ، نوارنقاله ها و رله ها هستند. انواع دیگری از محرک ها مانند المنت های گرم کننده ، لامپ ها ، المان های خنک کننده و نیز به وفور در صنعت یافت می شوند.
5- عناصر سخت افزاری دیگر : در جریان انتقال اطلاعات بین اجزای سیستم کنترل علاوه بر سخت افزارهای ذکر شده در بالا عملیات دیگری جهت تبدیل اطلاعات نیز باید انجام شود.طبیعتا این تبدیل ها به سخت افزارهای جداگانه ای نیاز دارند.به عنوان مثال فرض کنید که خروجی استاندارد شده یک سنسور دما را میخواهیم توسط کامپیوتر تحلیل کنیم ، به طور قطع به یک نصر ارتباطی بین PLC و کامپیوتر نیاز هست.
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
انواع روش های کنترلی (FeedBack , Feed Forward , Open loop و ... )
کنترل پس خور ( Feed Back Control) :
همانطور که در شکل زیر مشاهده میکنید در کنترل فیدبک اطلاعات مربوط به خروجی سیستم توسط سنسور ها و انتقال دهنده ها به سمت عقب برگشت داده میشود و به کنترل کننده وارد می شود.کنترل کننده پس از تحلیل اطلاعات ورودی تصمیم میگیرد و سپس آن را توسط انتقال دهنده به عنصر نهایی کنترل یا همان محرک یا همان وروردی فرایند منتقل میکند و محرک(ها) به نوبه خود روی خروجی سیستم تاثیر میگذارند.
کنترل فیدبک متداول ترین نوع کنترل است و بسیاری از کنترلرهای صنعتی بر همین اساس کار میکنند.
پس کنترل فیدبک بر اساس اندازه گیری خروجی زمان حال و تصمیم گیری بر اساس این اندازه گیری سیستم یا فرایند را کنترل میکند.
قبلا در مورد انواع ورودی ها گفتیم که دو نوع متغیر ورودی داریم:نوع اول که قابل اندازه گیری بود و نوع دوم که به طور مستقیم قابل اندازه گیری نبود و میتوانست بر حالت سیستم تاثیر بگذارد که به نام ورودی مزاحم (Disturbance) شناخته می شود.
خب حالا تصور کنید که از کنترل فیدبک استفاده کردیم و ورودی مزاحم به سیستم اعمال می شود در چنین حالتی سیستم به اصطلاح دچار آشفتگی (Upset) میشود. سیستم کنترل بعد از اندازه گیری خروجی و تشخیص اینکه خطایی رخ داده با اقدام مناسب خودش دوباره سیستم را اصلاح میکند و به حالت مورد نظر ما می رساند.
پس در کنترل فیدبک تصمیم گیری بعد از اتفاق افتادن (After The Fact) شروع میشود.
در زیر ساختار کنترل فیدبک را مشاهده میکنید:

کنترل پیشرو (Feed Forward Control) :
در این نوع کنترل کننده ورودی مزاحم به طور مستقیم اندازه گیری میشود و قبل از اینکه بتواند روی فرایند تاثیر منفی بگذارد یا به اصطلاح فرایند را دچار آشفتگی کند، کنترل کننده فرمان لازم را برای محرک ورودی میدهد تا اثر ورودی مزاحم را خنثی کند.
به این نوع کنترل کنترل پیشرو گفته میشود. همانطور که در شکل مشاهده میکنید جلوی ضربه اصلی ناشی از عمل ورودی مزاحم در خروجی گرفته میشود.
ویژگی اصلی این نوع کنترل این است که هیچ اطلاعاتی در مورد خروجی یا وضعیت تنظیمی خروجی فرایند نداریم.
شاید از معایب این نوع کنترل وابستگی شدید به مدل سیستم هست که البته همیشه مدل سیستم در دسترس نیست.همانطور که ذکر شد در این نوع کنترل هیچ اطلاعاتی از خروجی فرایند در دسترس نداریم.مشکل دوم این است که این نوع کنترل وقتی کارساز است که ورودی مزاحم قبل از ورود به سیستم اندازه گیری شود در غیر اینصورت هیچ تاثیر مثبتی نمیتوان از این نوع کنترل انتظار داشت.
در شکل زیر ساختار کنترل پیشرو را مشاهده میکنید:
کنترل حلقه باز (Open Loop Control) :
بر خلاف دو حالت قبل در این نوع کنترل هیچ گونه حلقه ای تشکیل نمیشود، تصمیم ها و فرمان های کنترلی بر اساس اطلاعات گرفته شده از خروجی نیست ، بلکه این محاسبات بر اساس محاسبات ، عملکردهای داخلی و همچنین اطلاعات اولیه از فرایند است.
به این ساختار کنترلی کنترل حلقه باز میگویند .اگر شکل این نوع کنترل را با دوحالت قبلی مقایسه کنید متوجه تفاوت های این نوع کنترل با قبلی ها می شوید.
نکته : باز بودن حلقه کنترل دلیلی بر عدم کارایی این نوع کنترل نیست
مثلا هیترهای معمولی ، کوره های معمولی ، فرایندهای تایمری ، این ها همگی از کنترل حلقه باز استفاده میکنند.
تصویر زیر ساختار این نوع کنترل را نشان میدهد :

مباحث دیگر در باب سیستم های کنترل :
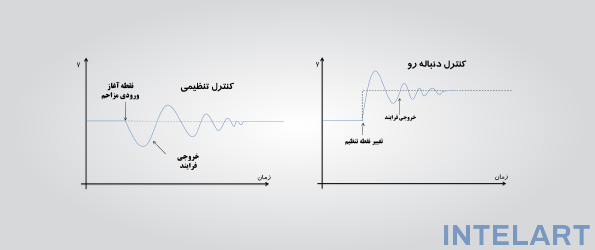
در سیستم های کنترل برخی از متغیرهای خروجی از اهمیت خیلی زیادی برخوردار هستند و باید همیشه در مقادیر خاصی که مثلا از جانب کاربر تنظیم میشود نگه داری شوند.یکی از اهداف اصلی کنترل همین ثابت نگه داشتن متغیرهای خروجی در مقادیر مد تنظیم شده است که البته این کنترل میتواند دستی یا اتوماتیک باشد.
پس تغییر متغیرها میتواند ناشی از دو مورد زیر باشد :
1- به علت تاثیر ورودی مزاحم
2- تغییر نقطه تنظیم توسط کاربر یا اپراتور
وقتی از کنترل تنظیمی (Regulary Control) صحبت میشود منظور این است که سیستم کنترل باید بتواند اثر ورودی مزاحم را خنثی کند و سیستم را در حالت تنظیم شده پایدار کند.از طرف دیگر هدف کنترل دنباله رو این است که اگر نقطه تنظیم توسط کاربر تغییر کرد بتواند در کمترین زمان ممکن تغییرات را دنبال کند و متغیر(های) خروجی را در این نقطه تنظیم شده نگه دارد.
تصویر زیر را ببینید:
طرح یک مثال :
تصور کنید که قراره دمای یک محیط بسته را کنترل کنیم.
این محیط بسته میتواند مبدل یک کوره صنعتی بخار آب یا هرچیز دیگری باشد.
1- خب قدم اول اینه که ببینیم به چه سیستم کنترلی نیاز داریم؟آیا اصلا با کنترل مساله حل میشود؟
2- قدم دوم اینه که متغیرهای کنترل را پیدا کنیم.البته متغیرهایی که در بهبود شرایط سیستم تاثیر دارند.(قبلا هم ذکر شد که بعضی از متغیرها هستند که امکان دسترسی مستقیم به آن ها وجود ندارد).
خب میتوان با جواب دادن به این سوال ها متغیرهای مناسب رو پیدا کرد :
کدام متغیرهای خروجی تعیین کننده هستند و میتوانند در بهبود شرایط سیستم و رسیدن به هدف نهایی موثر ظاهر باشند؟این ها متغیرهایی هستن که باید برای تصمیم گیری صحیح اندازه گیری بشوند.خب واضحه که در این سیستم دمای کوره یک متغیر مناسب هست.متغیرهای دیگری هم مثل فشار بخار خروجی ، دبی خروجی و از این قبیل وجود دارند که با داشتن آن ها میتوانیم یک سیستم کنترلی خیلی خوب طراحی کنیم ولی اینجا و در این مورد متغیری که از همه مهمتر هست دمای آب خروجی هست.
3- پیداکردن مهمترین ورودی ها . خب این دفعه هم چندین متغیر ورودی هست که میتوانند بر شرایط حاکم بر سیستم تاثیر بگذارند مثل : دمای آب ورودی به کوره ، میزان سوخت ورودی به کوره ، میزان هوای ورودی به مشعل کوره ، دبی آب ورودی به کوره و ...
سوال: از بین موارد بالا کدام یک ورودی مناسب و کدوم یک ورودی مزاحم هست ؟
جواب : میزان سوخت و هوای ورودی به مشعل از جمله متغیرهای ورودی هستند که میتوان توسط آنها خروجی را به نحو قابل قبولی کنترل کرد و دبی و دمای آب ورودی هم متغیرهای مزاحم هستند.
4- انتخاب روش کنترل مناسب. باید با توجه به ماهیت مسئله کنترلی مد نظر ، یک متد مناسب (فیدبک ، پیشرو ، حلقه باز و ...) انتخاب کنیم.(البته در پست بعدی در مورد این ساختارها توضیح بیشتری خواهیم داد)
5- طراحی کنترل کننده که میتواند با درجه مهارت های مختلفی اجرا بشه.خب این مورد خیلی مهم هست چرا که باید با درنظر گرفتن متغیر هایی که در بالا ذکر شد ، یک ساختار مناسب را انتخاب کنیم تا از طریق تنظیم متغیرهای ورودی بتوانیم تصمیم قابل قبولی جهت کنترل سیستم بگیریم.
پس داشتن یک درک صحیح از قواعد دینامیکی و ساختار سیستم میتواند به طراحی یک سیستم کنترل بهینه کمک شایانی بکند.
برخی نکات مهم :
مبحث کنترل آن گونه که میپندارید ساده و راحت نیست.در عمل مشکلات بسیار زیادی در روبه روی ما قرار دارد.از آنجایی که هدف ما پیاده سازی مناسبترین کنترل کننده است باید این موارد را هم در نظر بگیریم :
1- غیر خطی بودن فرایند : بسیاری از مدل هایی که در کتاب ها هستند و یا ما آن ها را برای آنالیز انتخاب میکنیم خطی هستند ولی واقعیت موجود چیز دیگری است.در عمل بسیاری از فرایندها در پیوستار غیر خطی هستند و طرح مسئله کنترل در این موارد پیچیدگی های زیادی را از جمله خطی سازی و ... در مقابل ما قرار میدهد.
2- خطاهای مدلسازی : ممکن است بتوانیم برای چند فرایند ساده عمل خطی سازی را با دقت بالا و بدون خطا انجام دهیم ولی در واقعیت سیستم ها گاهی آنقدر پیچیده هستند که هرگز خطی سازی ما آن دقت مورد نیاز را نخواهد داشت و باید این خطا به نحوی در فرموله کردن سیستم کنترل لحاظ شود وگرنه خروجی سیستم کنترل ما آن چیزی نخواهد بود که انتظار داریم !
3- سایر مشکلات اجرایی : واقعیت این است که در اجرا محدودیت ها بیشتر از آن است که فکرش را میکنیم. به عنوان مثال اگر در کاربردی بخواهیم دمای سیال عبوری از یک لوله را اندازه بگیریم باید این را هم در نظر بگیریم که اجسام اطراف لوله هم بر روی دمای سیال تاثیر میگذارند! یا مثلا ممکن است تاثیر گذاشتن رو یک متغیر باعث تغییر در متغیر دیگری شود و آن هم به نوبه خود با عث تغییر در متغیر دیگر!
گاهی اوقات نیز تاخیر زمانی از مشکلات جدی میباشد.فرض کنید که در یک خط طویل یک متغیر را تغییر میدهید ولی این تغییر بلافاصله در انتهای خط دیده نمیشود.باید فکری به حال تاخیر هم کرد!
حتی اگر یک طراحی کامل و دقیق داشته باشیم باز هم عواملی نظیر خطای سنسور ، خطای ترنسمیتر ، اینرسی شیرهای کنترل و عوامل دیگر مشکلات دیگری را بر سر راه ما میگذارند.
4- ساختارهای فرایند پیچیده : در مثالی که در بالا ارائه شد تعداد ورودی خروجی کم بود.اما در بسیاری اوقات تعداد متغیرها خیلی بیشتر بوده و روابط بین آن ها پیچیده است.که البته در این موارد میتوان فرایند پیچیده را به چند فرایند ساده تر تقسیم کرد که در این صورت مطالعه فرایند ساده تر میشود.
همانطور که در شکل زیر مشاهده میکنید در کنترل فیدبک اطلاعات مربوط به خروجی سیستم توسط سنسور ها و انتقال دهنده ها به سمت عقب برگشت داده میشود و به کنترل کننده وارد می شود.کنترل کننده پس از تحلیل اطلاعات ورودی تصمیم میگیرد و سپس آن را توسط انتقال دهنده به عنصر نهایی کنترل یا همان محرک یا همان وروردی فرایند منتقل میکند و محرک(ها) به نوبه خود روی خروجی سیستم تاثیر میگذارند.
کنترل فیدبک متداول ترین نوع کنترل است و بسیاری از کنترلرهای صنعتی بر همین اساس کار میکنند.
پس کنترل فیدبک بر اساس اندازه گیری خروجی زمان حال و تصمیم گیری بر اساس این اندازه گیری سیستم یا فرایند را کنترل میکند.
قبلا در مورد انواع ورودی ها گفتیم که دو نوع متغیر ورودی داریم:نوع اول که قابل اندازه گیری بود و نوع دوم که به طور مستقیم قابل اندازه گیری نبود و میتوانست بر حالت سیستم تاثیر بگذارد که به نام ورودی مزاحم (Disturbance) شناخته می شود.
خب حالا تصور کنید که از کنترل فیدبک استفاده کردیم و ورودی مزاحم به سیستم اعمال می شود در چنین حالتی سیستم به اصطلاح دچار آشفتگی (Upset) میشود. سیستم کنترل بعد از اندازه گیری خروجی و تشخیص اینکه خطایی رخ داده با اقدام مناسب خودش دوباره سیستم را اصلاح میکند و به حالت مورد نظر ما می رساند.
پس در کنترل فیدبک تصمیم گیری بعد از اتفاق افتادن (After The Fact) شروع میشود.
در زیر ساختار کنترل فیدبک را مشاهده میکنید:
کنترل پیشرو (Feed Forward Control) :
در این نوع کنترل کننده ورودی مزاحم به طور مستقیم اندازه گیری میشود و قبل از اینکه بتواند روی فرایند تاثیر منفی بگذارد یا به اصطلاح فرایند را دچار آشفتگی کند، کنترل کننده فرمان لازم را برای محرک ورودی میدهد تا اثر ورودی مزاحم را خنثی کند.
به این نوع کنترل کنترل پیشرو گفته میشود. همانطور که در شکل مشاهده میکنید جلوی ضربه اصلی ناشی از عمل ورودی مزاحم در خروجی گرفته میشود.
ویژگی اصلی این نوع کنترل این است که هیچ اطلاعاتی در مورد خروجی یا وضعیت تنظیمی خروجی فرایند نداریم.
شاید از معایب این نوع کنترل وابستگی شدید به مدل سیستم هست که البته همیشه مدل سیستم در دسترس نیست.همانطور که ذکر شد در این نوع کنترل هیچ اطلاعاتی از خروجی فرایند در دسترس نداریم.مشکل دوم این است که این نوع کنترل وقتی کارساز است که ورودی مزاحم قبل از ورود به سیستم اندازه گیری شود در غیر اینصورت هیچ تاثیر مثبتی نمیتوان از این نوع کنترل انتظار داشت.
در شکل زیر ساختار کنترل پیشرو را مشاهده میکنید:
کنترل حلقه باز (Open Loop Control) :
بر خلاف دو حالت قبل در این نوع کنترل هیچ گونه حلقه ای تشکیل نمیشود، تصمیم ها و فرمان های کنترلی بر اساس اطلاعات گرفته شده از خروجی نیست ، بلکه این محاسبات بر اساس محاسبات ، عملکردهای داخلی و همچنین اطلاعات اولیه از فرایند است.
به این ساختار کنترلی کنترل حلقه باز میگویند .اگر شکل این نوع کنترل را با دوحالت قبلی مقایسه کنید متوجه تفاوت های این نوع کنترل با قبلی ها می شوید.
نکته : باز بودن حلقه کنترل دلیلی بر عدم کارایی این نوع کنترل نیست
مثلا هیترهای معمولی ، کوره های معمولی ، فرایندهای تایمری ، این ها همگی از کنترل حلقه باز استفاده میکنند.
تصویر زیر ساختار این نوع کنترل را نشان میدهد :
مباحث دیگر در باب سیستم های کنترل :
در سیستم های کنترل برخی از متغیرهای خروجی از اهمیت خیلی زیادی برخوردار هستند و باید همیشه در مقادیر خاصی که مثلا از جانب کاربر تنظیم میشود نگه داری شوند.یکی از اهداف اصلی کنترل همین ثابت نگه داشتن متغیرهای خروجی در مقادیر مد تنظیم شده است که البته این کنترل میتواند دستی یا اتوماتیک باشد.
پس تغییر متغیرها میتواند ناشی از دو مورد زیر باشد :
1- به علت تاثیر ورودی مزاحم
2- تغییر نقطه تنظیم توسط کاربر یا اپراتور
وقتی از کنترل تنظیمی (Regulary Control) صحبت میشود منظور این است که سیستم کنترل باید بتواند اثر ورودی مزاحم را خنثی کند و سیستم را در حالت تنظیم شده پایدار کند.از طرف دیگر هدف کنترل دنباله رو این است که اگر نقطه تنظیم توسط کاربر تغییر کرد بتواند در کمترین زمان ممکن تغییرات را دنبال کند و متغیر(های) خروجی را در این نقطه تنظیم شده نگه دارد.
تصویر زیر را ببینید:
طرح یک مثال :
تصور کنید که قراره دمای یک محیط بسته را کنترل کنیم.
این محیط بسته میتواند مبدل یک کوره صنعتی بخار آب یا هرچیز دیگری باشد.
1- خب قدم اول اینه که ببینیم به چه سیستم کنترلی نیاز داریم؟آیا اصلا با کنترل مساله حل میشود؟
2- قدم دوم اینه که متغیرهای کنترل را پیدا کنیم.البته متغیرهایی که در بهبود شرایط سیستم تاثیر دارند.(قبلا هم ذکر شد که بعضی از متغیرها هستند که امکان دسترسی مستقیم به آن ها وجود ندارد).
خب میتوان با جواب دادن به این سوال ها متغیرهای مناسب رو پیدا کرد :
کدام متغیرهای خروجی تعیین کننده هستند و میتوانند در بهبود شرایط سیستم و رسیدن به هدف نهایی موثر ظاهر باشند؟این ها متغیرهایی هستن که باید برای تصمیم گیری صحیح اندازه گیری بشوند.خب واضحه که در این سیستم دمای کوره یک متغیر مناسب هست.متغیرهای دیگری هم مثل فشار بخار خروجی ، دبی خروجی و از این قبیل وجود دارند که با داشتن آن ها میتوانیم یک سیستم کنترلی خیلی خوب طراحی کنیم ولی اینجا و در این مورد متغیری که از همه مهمتر هست دمای آب خروجی هست.
3- پیداکردن مهمترین ورودی ها . خب این دفعه هم چندین متغیر ورودی هست که میتوانند بر شرایط حاکم بر سیستم تاثیر بگذارند مثل : دمای آب ورودی به کوره ، میزان سوخت ورودی به کوره ، میزان هوای ورودی به مشعل کوره ، دبی آب ورودی به کوره و ...
سوال: از بین موارد بالا کدام یک ورودی مناسب و کدوم یک ورودی مزاحم هست ؟
جواب : میزان سوخت و هوای ورودی به مشعل از جمله متغیرهای ورودی هستند که میتوان توسط آنها خروجی را به نحو قابل قبولی کنترل کرد و دبی و دمای آب ورودی هم متغیرهای مزاحم هستند.
4- انتخاب روش کنترل مناسب. باید با توجه به ماهیت مسئله کنترلی مد نظر ، یک متد مناسب (فیدبک ، پیشرو ، حلقه باز و ...) انتخاب کنیم.(البته در پست بعدی در مورد این ساختارها توضیح بیشتری خواهیم داد)
5- طراحی کنترل کننده که میتواند با درجه مهارت های مختلفی اجرا بشه.خب این مورد خیلی مهم هست چرا که باید با درنظر گرفتن متغیر هایی که در بالا ذکر شد ، یک ساختار مناسب را انتخاب کنیم تا از طریق تنظیم متغیرهای ورودی بتوانیم تصمیم قابل قبولی جهت کنترل سیستم بگیریم.
پس داشتن یک درک صحیح از قواعد دینامیکی و ساختار سیستم میتواند به طراحی یک سیستم کنترل بهینه کمک شایانی بکند.
برخی نکات مهم :
مبحث کنترل آن گونه که میپندارید ساده و راحت نیست.در عمل مشکلات بسیار زیادی در روبه روی ما قرار دارد.از آنجایی که هدف ما پیاده سازی مناسبترین کنترل کننده است باید این موارد را هم در نظر بگیریم :
1- غیر خطی بودن فرایند : بسیاری از مدل هایی که در کتاب ها هستند و یا ما آن ها را برای آنالیز انتخاب میکنیم خطی هستند ولی واقعیت موجود چیز دیگری است.در عمل بسیاری از فرایندها در پیوستار غیر خطی هستند و طرح مسئله کنترل در این موارد پیچیدگی های زیادی را از جمله خطی سازی و ... در مقابل ما قرار میدهد.
2- خطاهای مدلسازی : ممکن است بتوانیم برای چند فرایند ساده عمل خطی سازی را با دقت بالا و بدون خطا انجام دهیم ولی در واقعیت سیستم ها گاهی آنقدر پیچیده هستند که هرگز خطی سازی ما آن دقت مورد نیاز را نخواهد داشت و باید این خطا به نحوی در فرموله کردن سیستم کنترل لحاظ شود وگرنه خروجی سیستم کنترل ما آن چیزی نخواهد بود که انتظار داریم !
3- سایر مشکلات اجرایی : واقعیت این است که در اجرا محدودیت ها بیشتر از آن است که فکرش را میکنیم. به عنوان مثال اگر در کاربردی بخواهیم دمای سیال عبوری از یک لوله را اندازه بگیریم باید این را هم در نظر بگیریم که اجسام اطراف لوله هم بر روی دمای سیال تاثیر میگذارند! یا مثلا ممکن است تاثیر گذاشتن رو یک متغیر باعث تغییر در متغیر دیگری شود و آن هم به نوبه خود با عث تغییر در متغیر دیگر!
گاهی اوقات نیز تاخیر زمانی از مشکلات جدی میباشد.فرض کنید که در یک خط طویل یک متغیر را تغییر میدهید ولی این تغییر بلافاصله در انتهای خط دیده نمیشود.باید فکری به حال تاخیر هم کرد!
حتی اگر یک طراحی کامل و دقیق داشته باشیم باز هم عواملی نظیر خطای سنسور ، خطای ترنسمیتر ، اینرسی شیرهای کنترل و عوامل دیگر مشکلات دیگری را بر سر راه ما میگذارند.
4- ساختارهای فرایند پیچیده : در مثالی که در بالا ارائه شد تعداد ورودی خروجی کم بود.اما در بسیاری اوقات تعداد متغیرها خیلی بیشتر بوده و روابط بین آن ها پیچیده است.که البته در این موارد میتوان فرایند پیچیده را به چند فرایند ساده تر تقسیم کرد که در این صورت مطالعه فرایند ساده تر میشود.
- پیوستها
-
- Asset 4.png
- (41.08 KiB) هنوز دانلود نشده
-
- Asset 3.png
- (52.81 KiB) هنوز دانلود نشده
-
- Asset 2.png
- (58.23 KiB) هنوز دانلود نشده
-
- Asset 1.png
- (63.43 KiB) هنوز دانلود نشده
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
انواع مدل های سیستم و مدل های مرتبه اول با تاخیر زمانی
همانطور که قبلا نیز بحث شد داشتن یک مدل دقیق از سیستم کار کنترل را بسیار راحت میکند و داشتن یک مدل ریاضی دقیق به کنترل دقیق می انجامد.همچنین مدل سازی ریاضی یکی از مفیدترین ، مهمترین و واضح ترین شیوه های مدلسازی است که میتواند برای نشان دادن رفتار فرایند استفاده شود.اما عمدتا این روش ها پیچیده بوده و نیاز به تخصص های متفاوتی دارد.پس برای داشتن یک مدل ریاضی دقیق از یک سیستم باید شناخت و تخصص کامل در خصوص آن فرایند داشته باشیم که البته این امکان پذیر نیست.از طرفی ممکن است برخی از ویژگی های فرایند را نتوانیم به خوبی بشناسیم و نتیجه آن ذکر نشدن آن ویژگی در فرمول ریاضی بدست آمده است.
از این رو غالبا از روش مدلسازی تجربی استفاده می شود این شیوه ها غالبا آسان دقیق و کامل می باشند و به سادگی میتوان آن ها را برای انواع فرایندها توسعه داد.در این نوع مدلسازی به فرایند به چشم یک جعبه سیاه نگاه می شود یعنی ورودی به فرایند اعمال شده و خروجی از آن نتیجه گرفته میشود ، پس بر خلاف مدلسازی ریاضی هیچ اطلاعاتی از درون سیستم نداریم.
اصولا در این روش ابتدا نوع سیستم را مشخص میکنیم (مرتبه اول یا دوم یا ...) سپس با استفاده از داده های ورودی خروجی که از سیستم به دست آورده ایم سعی میکنیم تا یک مدل منطبق با آن داده ها بدست آوریم.پس میتوان از این نوع مدلسازی در شرایطی که هیچ اطلاعی از ساختار درونی یک سیستم نداریم استفاده کنیم.
بدست آوردن مدل تجربی به صورت دستی کمی دشوار است و نیاز به محاسبات بسیار دارد ولی امکان پذیر است.نوع دیگر مدلسازی که ما بر آن تکیه میکنیم مدلسازی با نرم افزار است که میتواند در مدت کوتاهی مدلی بسیار دقیق بر پایه اطلاعات داده شده به آن تولید کند.بنابراین، از بحث پیرامون مدل سازی تجربی به شیوه دستی صرف نظر میکنیم.
انواع مدل های سیستم :
مدل های درجه اول همراه با تاخیر زمانی :
اصول این روش بر مبنای بدست آوردن پاسخ پله واحد است.از آن جایی که اکثر فرایند های صنعتی از این نوع هستند و به منحنی های S شکل معروف هستند ما نیز تمرکز بیشتری برای این مدل به خرج میدهیم.
تابع تبدیل ورودی خروجی یک فرایند با چنین منحنی پاسخی را میتوان به صورت تابع تبدیل زیر تعریف نمود که به آن تابع تبدیل درجه اول همراه با تاخیر زمانی گفته میشود :
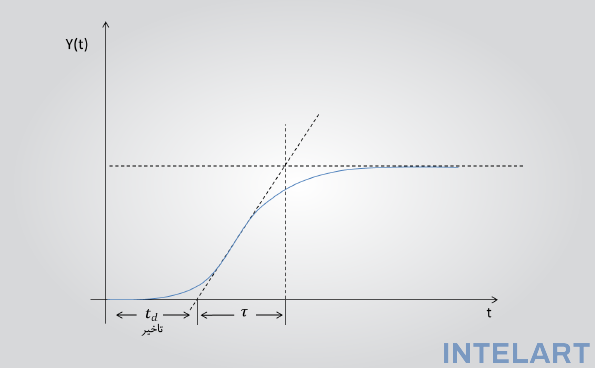
همانطور که مشاهده میکنید این یک تابع تبدیل درجه یک به همراه تاخیر زمانی است.البته تاخیر زمانی خود یک رفتار مرتبه بالاتر را نشان میدهد و نباید آن را به اشتباه درجه اول تصور نمود.
این را هم در نظر داشته باشید که تاخیر زمانی در حوزه لاپلاس معادل شیفت زمانی در حوزه زمان است.
برای یافتن پارامتر های تابع تبدیل مذکور باید ابتدا سه پارامتر شامل بهره DC یا بهره مانای مربوط به K ، ثابت زمانی T و تاخیر زمانی Td را بدست آوریم .
برای این منظور خط مماس بر منحنی را که از نقطه عطف منحنی (جایی که تقعر منحنی تغییر پیدا میکند) عبور میکند رسم میکنیم.بدین ترتیب پارامترهای مجهول محاسبه خواهند شد.
توجه کنید که این مدل یک تقریب اولیه است و اگر خروجی سیستم با خروجی این مدل یکی نباشد باید از ساختار های دیگری استفاده شود که چون ما بدان نیاز نداریم از گفتن آن صرف نظر میشود. پس از سیستم های مرتبه اول با تاخیر زمانی سراغ سیستم های با مرتبه بالاتر میرویم اما از آنجا که در اکثر کاربردهای صنعتی با سیستم های ساده چون سیستم های حرارتی، دبی، فشار، وزن و... سروکار داریم از گفتن مباحث مربوط به سیستم های مرتبه بالاتر در حال حاضر خودداری میکنیم.
مطالب گفته شده در این پست در آینده برای بدست آوردن ضرایب PID برای سیستم های مرتبه اول با تاخیر زمانی (به عناون مثال سیستم های حرارتی) استفاده خواهد شد.
از این رو غالبا از روش مدلسازی تجربی استفاده می شود این شیوه ها غالبا آسان دقیق و کامل می باشند و به سادگی میتوان آن ها را برای انواع فرایندها توسعه داد.در این نوع مدلسازی به فرایند به چشم یک جعبه سیاه نگاه می شود یعنی ورودی به فرایند اعمال شده و خروجی از آن نتیجه گرفته میشود ، پس بر خلاف مدلسازی ریاضی هیچ اطلاعاتی از درون سیستم نداریم.
اصولا در این روش ابتدا نوع سیستم را مشخص میکنیم (مرتبه اول یا دوم یا ...) سپس با استفاده از داده های ورودی خروجی که از سیستم به دست آورده ایم سعی میکنیم تا یک مدل منطبق با آن داده ها بدست آوریم.پس میتوان از این نوع مدلسازی در شرایطی که هیچ اطلاعی از ساختار درونی یک سیستم نداریم استفاده کنیم.
بدست آوردن مدل تجربی به صورت دستی کمی دشوار است و نیاز به محاسبات بسیار دارد ولی امکان پذیر است.نوع دیگر مدلسازی که ما بر آن تکیه میکنیم مدلسازی با نرم افزار است که میتواند در مدت کوتاهی مدلی بسیار دقیق بر پایه اطلاعات داده شده به آن تولید کند.بنابراین، از بحث پیرامون مدل سازی تجربی به شیوه دستی صرف نظر میکنیم.
انواع مدل های سیستم :
مدل های درجه اول همراه با تاخیر زمانی :
اصول این روش بر مبنای بدست آوردن پاسخ پله واحد است.از آن جایی که اکثر فرایند های صنعتی از این نوع هستند و به منحنی های S شکل معروف هستند ما نیز تمرکز بیشتری برای این مدل به خرج میدهیم.
تابع تبدیل ورودی خروجی یک فرایند با چنین منحنی پاسخی را میتوان به صورت تابع تبدیل زیر تعریف نمود که به آن تابع تبدیل درجه اول همراه با تاخیر زمانی گفته میشود :
همانطور که مشاهده میکنید این یک تابع تبدیل درجه یک به همراه تاخیر زمانی است.البته تاخیر زمانی خود یک رفتار مرتبه بالاتر را نشان میدهد و نباید آن را به اشتباه درجه اول تصور نمود.
این را هم در نظر داشته باشید که تاخیر زمانی در حوزه لاپلاس معادل شیفت زمانی در حوزه زمان است.
برای یافتن پارامتر های تابع تبدیل مذکور باید ابتدا سه پارامتر شامل بهره DC یا بهره مانای مربوط به K ، ثابت زمانی T و تاخیر زمانی Td را بدست آوریم .
برای این منظور خط مماس بر منحنی را که از نقطه عطف منحنی (جایی که تقعر منحنی تغییر پیدا میکند) عبور میکند رسم میکنیم.بدین ترتیب پارامترهای مجهول محاسبه خواهند شد.
توجه کنید که این مدل یک تقریب اولیه است و اگر خروجی سیستم با خروجی این مدل یکی نباشد باید از ساختار های دیگری استفاده شود که چون ما بدان نیاز نداریم از گفتن آن صرف نظر میشود. پس از سیستم های مرتبه اول با تاخیر زمانی سراغ سیستم های با مرتبه بالاتر میرویم اما از آنجا که در اکثر کاربردهای صنعتی با سیستم های ساده چون سیستم های حرارتی، دبی، فشار، وزن و... سروکار داریم از گفتن مباحث مربوط به سیستم های مرتبه بالاتر در حال حاضر خودداری میکنیم.
مطالب گفته شده در این پست در آینده برای بدست آوردن ضرایب PID برای سیستم های مرتبه اول با تاخیر زمانی (به عناون مثال سیستم های حرارتی) استفاده خواهد شد.
- پیوستها
-
- Asset 5.png
- (46.83 KiB) هنوز دانلود نشده
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
کنترلرهای کلاسیک و خواص آن ها
همانطور که قبلا گفته شد در بسیاری از سیستم های کنترل ، کنترل کننده خروجی را اندازه گیری میکند و پس از مقایسه با مقدار مد نظر ما ، مقدار خطا را محاسبه کرده و در نهایت خروجی مناسب را ایجاد کرده و آن خروجی را به سیستم اعمال میکند تا رفتار سیستم را به اصطلاح اصلاح کند و در مسیر درست قرارش بدهد.
به این نوع کنترل کنترل فیدبک یا حلقه بسته گفته میشود (دلیلش در پست های قبلی ذکر شد).در مقابل این مفهوم کنترلی ، کنترل حلقه باز مطرح میشود که در اون حالت هیچ اندازه گیری از خروجی انجام نمیشه و کنترلر بر اساس اطلاعات اولیه و اطلاعات داخلی خودش تصمیم میگیرد.
در تصویر زیر این دو نوع کنترل را مقایسه میکنیم :

ویژگی های عمومی یک سیستم فیدبک :
کنترل فیدبک چندین ویژگی قابل توجه و مهم دارد که باعث شده است در بسیاری از سیستم های کنترل مورد استفاده قرار گیرد.البته نسبت به کنترل حلقه باز پیچیدگی های ساخت و مشکلات طراحی به آن اضافه می شود!.
در زیر سیستم کنترل حلقه باز و حلقه بسته را مشاهده میکنید:

خروجی برای سیستم های فیدبک و حلقه باز را مشاهده میکنید :

در سیستم حلقه باز واضح است که هر تغییری در ساختار کنترلر به طور مستقیم بر خروجی اثر می گذارد ولی در سیستم حلقه بسته اگر اندازه بهره (Gain) یا همان |DG| خیلی بزرگتر از 1 انتخاب شود میتوان از عدد 1 در مخرج کسر صرف نظر کرد و به دنبال آن صورت و مخرج کسر را ساده کرد. به طور تقریبی میتوان نوشت:
پس میتوان این استدلال را داشت که تغییر در D و G اثری بر خروجی ندارد ، یعنی خروجی مستقل از این تغییرات عمل خواهد کرد.این کاهش حساسیت سیستم به تغییرات پارامترها دلیل اساسی استفاده از سیستم های کنترل فیدبک است.
اگرچه مهمترین دلیل استفاده از فیدبک کاهش حساسیت سیستم می باشد ولی خصوصیات مفید دیگری نیز در استفاده از کنترل فیدبک وجود دارد که به شرح ذیل بیان می شوند:
حذف اثر ورودی مزاحم (Disturbance Rejection) :
در سیستم کنترل فیدبک تصمیم ها بر اساس اندازه گیری از خروجی گرفته می شود ، بنابراین اثر ورودی مزاحم که در خروجی ظاهر میشود قابل جبران است. این در حالی است که سیستم کنترل حلقه باز به خاطر عدم اندازه گیری خروجی قادر به حل این مشکل نیست.
عدم قطعیت مدل های طراحی شده (Model Noncertainty) :
مدل ها همیشه تقریبی از فرایند واقعی هستند .در ساختار فیدبک به خاطر حذف تقریبی اثر G (مدل فرایند و مدل کنترل کننده) ، عدم قطعیت موجود برای مدل بدست آمده تاثیر گذار نخواهد بود ولی در کنترل حلقه باز این ویژگی موضوعیت ندارد.
ناپایداری فرایند :
اگر فرایند ناپایدار باشد کنترل حلقه باز کارایی ندارد درحالی که با به کار گیری سیستم کنترلی فیدبک میتوان این مسئله را حل کرد.
به این نوع کنترل کنترل فیدبک یا حلقه بسته گفته میشود (دلیلش در پست های قبلی ذکر شد).در مقابل این مفهوم کنترلی ، کنترل حلقه باز مطرح میشود که در اون حالت هیچ اندازه گیری از خروجی انجام نمیشه و کنترلر بر اساس اطلاعات اولیه و اطلاعات داخلی خودش تصمیم میگیرد.
در تصویر زیر این دو نوع کنترل را مقایسه میکنیم :
ویژگی های عمومی یک سیستم فیدبک :
کنترل فیدبک چندین ویژگی قابل توجه و مهم دارد که باعث شده است در بسیاری از سیستم های کنترل مورد استفاده قرار گیرد.البته نسبت به کنترل حلقه باز پیچیدگی های ساخت و مشکلات طراحی به آن اضافه می شود!.
در زیر سیستم کنترل حلقه باز و حلقه بسته را مشاهده میکنید:
خروجی برای سیستم های فیدبک و حلقه باز را مشاهده میکنید :
در سیستم حلقه باز واضح است که هر تغییری در ساختار کنترلر به طور مستقیم بر خروجی اثر می گذارد ولی در سیستم حلقه بسته اگر اندازه بهره (Gain) یا همان |DG| خیلی بزرگتر از 1 انتخاب شود میتوان از عدد 1 در مخرج کسر صرف نظر کرد و به دنبال آن صورت و مخرج کسر را ساده کرد. به طور تقریبی میتوان نوشت:
کد: انتخاب همه
Y(s) ~ R(s)اگرچه مهمترین دلیل استفاده از فیدبک کاهش حساسیت سیستم می باشد ولی خصوصیات مفید دیگری نیز در استفاده از کنترل فیدبک وجود دارد که به شرح ذیل بیان می شوند:
حذف اثر ورودی مزاحم (Disturbance Rejection) :
در سیستم کنترل فیدبک تصمیم ها بر اساس اندازه گیری از خروجی گرفته می شود ، بنابراین اثر ورودی مزاحم که در خروجی ظاهر میشود قابل جبران است. این در حالی است که سیستم کنترل حلقه باز به خاطر عدم اندازه گیری خروجی قادر به حل این مشکل نیست.
عدم قطعیت مدل های طراحی شده (Model Noncertainty) :
مدل ها همیشه تقریبی از فرایند واقعی هستند .در ساختار فیدبک به خاطر حذف تقریبی اثر G (مدل فرایند و مدل کنترل کننده) ، عدم قطعیت موجود برای مدل بدست آمده تاثیر گذار نخواهد بود ولی در کنترل حلقه باز این ویژگی موضوعیت ندارد.
ناپایداری فرایند :
اگر فرایند ناپایدار باشد کنترل حلقه باز کارایی ندارد درحالی که با به کار گیری سیستم کنترلی فیدبک میتوان این مسئله را حل کرد.
- پیوستها
-
- Asset 8.png
- (25.95 KiB) هنوز دانلود نشده
-
- Asset 7.png
- (27.44 KiB) هنوز دانلود نشده
-
- Asset 6.png
- (44.05 KiB) هنوز دانلود نشده
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
کنترل کننده دو وضعیتی و مزایا و معایب آن
انواع کنترل فیدبک :
در این پست میخواهیم روی تابع تبدیل کنترل کننده یا همان (s)D تمرکز کنیم.در پست قبل اگر به شکل ها نگاه کنید ، یک بلوک D(s) در همه آن ها دیده می شود.خب چه نوع D(s)ای برای این قسمت انتخاب کنیم؟؟؟ جوابهای زیاد و متنوعی برای این قسمت وجود دارد ولی ما در اینجا صرفا به معمولی ترین و پرکاربردترین آن در صنعت میپردازیم. به شکل زیر نگاه کنید :
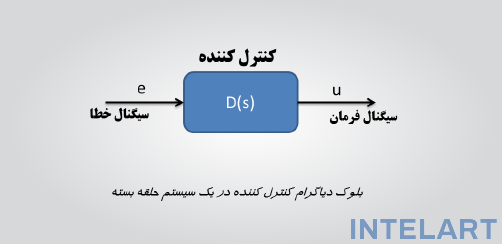
ورودی این بلوک سیگنال خطا (در پست قبل توضیحات در مورد سیگنال خطا ارائه شد) و خروجی آن همان سیگنال کنترل یا ورودی فرایند است.
کنترل کننده دو وضعیتی :
اگرچه یک کنترل فیدبک بسیار قدرتمندتر از یک کنترل حلقه باز هست ولی کیفیت و تاثیر گذاری کنترلرهای فیدبک به نوع آن وابسته ست و مهمه که برای هر کاربرد خاص بتوانیم یک نوع مناسب برای کنترلر فیدبک انتخاب کنیم.
یک نوع از این کنترل کننده ها که ساده ترین اون نوع هست کنترل دو وضعیتی (ON/OFF) که در فرایندهای ساده و خیلی کم اهمیت استفاده می شود :

e(t) : خطای کنترل (برای فیدبک واحد)
U(t) : سیگنال کنترل (خروجی کنترل کننده)
عملکرد این نوع کنترل کننده به این صورته که ابتدا خروجی اندازه گیری میشود و مقدار آن با مقدار مطلوب مقایسه میشود و در نهایت بر اساس این مقایسه سیگنال خطا محاسبه میشود. همانطور که در پست قبلی اشاره شد، سیگنال خطا از کم کردن خروجی از مقدار مطلوب بدست می آید. حالا که سیگنال خطا را بدست آوردیم بر اساس آن خروجی کنترلر را میسازیم. این کنترلر همانطور که در شکل بالا دیده میشود به ازای خطاهای بزرگتر از صفر ، بیشترین و قوی ترین سیگنال کنترلی را به فرایند اعمال میکند و برعکس به ازای خطاهای کوچکتر مساوی صفر ، ضعیف ترین سیگنال کنترلی را به فرایند اعمال میکند. در حقیقت عملکرد این نوع کنترلر مثل یک سوئیچ خاموش روشن هست. اگر بخواهیم مثالی برای این نوع کنترلر در نظر بگیریم میتوان از یخچال های قدیمی نام برد. دما اندازه گیری میشود و اگر از مقدار مطلوب کمتر بود( یعنی سیگنال خطا مثبت هست )در نتیجه کمپرسور را روشن میکند، این یعنی قوی ترین سیگنال کنترلی که میتوان به کمپرسور اعمال کرد و برعکس وقتی دما از مقدار تنظیم شده بیشتر شود سیگنال خطا منفی شده و کمپرسور توسط کنترل کننده فیدبک(که روی یخچال تعبیه شده) خاموش میشود.
واضح است که در این مثالی که ارائه شد ، کمپرسور یخچال هرگز در وضعیت میانه ای قرار ندارد ، یعنی دورش متغیر نیست و یا خاموش بوده ، یا کاملا با تمام قدرت کار میکند.
در این نوع کنترل کننده ها باید یک حد بالا و یک حد پایین برای مقدار تنظیمی در نظر گرفت که خروجی سیستم بین این دو مقدار نوسان کند.
سوال: چرا باید محدوده تعیین شود؟ جواب: اگر فقط یک مقدار برای اینکار در نظر گرفته شود باعث میشود که کمپرسور یخچال یا همان فرایند مرتبا تحت اعمال سیگنال کنترل قرار بگیرد. تصور کنید در همین یخچال دما روی مقدار 1 درجه تنطیم شده باشد و هیچ بازه یا حد بالا و پایینی برایش تعریف نشود. عکس العمل کنترلر اینجا چی میشود؟ به محض اینکه دما به اندازه یک اپسیلون از 1درجه بیشتر شود، کمپرسور را استارت میکند، در این حالت دما شروع به کاهش میکند و به محض اینکه به 1 درجه برسد کمپرسور خاموش میشود. خب حالا فرض کنید که به خاطر نشتی گرما و باز و بسته شدن در یخچال بخواهد این سیکل مرتبا تکرار شود ، نتیجه چه میشود؟ کمپرسور یخچال پس از مدتی به شدت فرسوده و حتی تخریب میشود.
برای اینکه در این نوع کنترل فرایند مرتبا تحت شوک قرار نگیرد باید یک بازه مرده تعریف کرد. مثلا میخوایم دما روی 1 درجه باشد ولی بازه تعریفی باید بین 1- و 3 باشد. با این کار تعداد دفعات خاموش روشن شدن کمپرسور خیلی کمتر میشود.
در زیر خروجی کنترل کننده و رفتار فرایند را مشاهده میکنید :
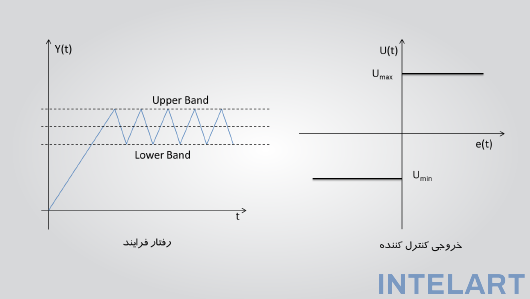
همونطور که از نمودار رفتار فرایند پیداست ، این نوع کنترل کننده نمیتواند خروجی را در یک وضعیت ثابت نگه دارد و خروجی دائما بین دو محدوده مشخص نوسان میکند ، پس هیچوقت خطا 0 نمیشود!
یکی دیگر از مشکلات این سیستم این است که خروجی به سرعت به مقدار مطلوب میرسد ولی در همان مقدار ثابت نمی ماند ، چرا که در این حالت فرمان کنترل دوباره تغییر میکند و خروجی فرایند شروع به کاهش میکند تا دوباره سیگنال کنترلی قوی اعمال شود.
اگر به خروجی کنترل کننده نگاه کنید متوجه میشوید که خروجی این نوع کنترلر پیوسته نیست یعنی تابع عملکرد پیوسته ای ندارد و با تغییر بسیار کوچکی در خطا ، خروجی تغییر شدیدی پیدا میکند. ، از این جهت در بسیاری از کاربردهای کنترلی قابل اجرا نیست و فقط در کاربردهای ساده مثل یخچال ، برخی کوره ها (و امثال آن در کاربردهای خانگی و صنعت) استفاده میشود.
در این پست میخواهیم روی تابع تبدیل کنترل کننده یا همان (s)D تمرکز کنیم.در پست قبل اگر به شکل ها نگاه کنید ، یک بلوک D(s) در همه آن ها دیده می شود.خب چه نوع D(s)ای برای این قسمت انتخاب کنیم؟؟؟ جوابهای زیاد و متنوعی برای این قسمت وجود دارد ولی ما در اینجا صرفا به معمولی ترین و پرکاربردترین آن در صنعت میپردازیم. به شکل زیر نگاه کنید :
ورودی این بلوک سیگنال خطا (در پست قبل توضیحات در مورد سیگنال خطا ارائه شد) و خروجی آن همان سیگنال کنترل یا ورودی فرایند است.
کنترل کننده دو وضعیتی :
اگرچه یک کنترل فیدبک بسیار قدرتمندتر از یک کنترل حلقه باز هست ولی کیفیت و تاثیر گذاری کنترلرهای فیدبک به نوع آن وابسته ست و مهمه که برای هر کاربرد خاص بتوانیم یک نوع مناسب برای کنترلر فیدبک انتخاب کنیم.
یک نوع از این کنترل کننده ها که ساده ترین اون نوع هست کنترل دو وضعیتی (ON/OFF) که در فرایندهای ساده و خیلی کم اهمیت استفاده می شود :
e(t) : خطای کنترل (برای فیدبک واحد)
U(t) : سیگنال کنترل (خروجی کنترل کننده)
عملکرد این نوع کنترل کننده به این صورته که ابتدا خروجی اندازه گیری میشود و مقدار آن با مقدار مطلوب مقایسه میشود و در نهایت بر اساس این مقایسه سیگنال خطا محاسبه میشود. همانطور که در پست قبلی اشاره شد، سیگنال خطا از کم کردن خروجی از مقدار مطلوب بدست می آید. حالا که سیگنال خطا را بدست آوردیم بر اساس آن خروجی کنترلر را میسازیم. این کنترلر همانطور که در شکل بالا دیده میشود به ازای خطاهای بزرگتر از صفر ، بیشترین و قوی ترین سیگنال کنترلی را به فرایند اعمال میکند و برعکس به ازای خطاهای کوچکتر مساوی صفر ، ضعیف ترین سیگنال کنترلی را به فرایند اعمال میکند. در حقیقت عملکرد این نوع کنترلر مثل یک سوئیچ خاموش روشن هست. اگر بخواهیم مثالی برای این نوع کنترلر در نظر بگیریم میتوان از یخچال های قدیمی نام برد. دما اندازه گیری میشود و اگر از مقدار مطلوب کمتر بود( یعنی سیگنال خطا مثبت هست )در نتیجه کمپرسور را روشن میکند، این یعنی قوی ترین سیگنال کنترلی که میتوان به کمپرسور اعمال کرد و برعکس وقتی دما از مقدار تنظیم شده بیشتر شود سیگنال خطا منفی شده و کمپرسور توسط کنترل کننده فیدبک(که روی یخچال تعبیه شده) خاموش میشود.
واضح است که در این مثالی که ارائه شد ، کمپرسور یخچال هرگز در وضعیت میانه ای قرار ندارد ، یعنی دورش متغیر نیست و یا خاموش بوده ، یا کاملا با تمام قدرت کار میکند.
در این نوع کنترل کننده ها باید یک حد بالا و یک حد پایین برای مقدار تنظیمی در نظر گرفت که خروجی سیستم بین این دو مقدار نوسان کند.
سوال: چرا باید محدوده تعیین شود؟ جواب: اگر فقط یک مقدار برای اینکار در نظر گرفته شود باعث میشود که کمپرسور یخچال یا همان فرایند مرتبا تحت اعمال سیگنال کنترل قرار بگیرد. تصور کنید در همین یخچال دما روی مقدار 1 درجه تنطیم شده باشد و هیچ بازه یا حد بالا و پایینی برایش تعریف نشود. عکس العمل کنترلر اینجا چی میشود؟ به محض اینکه دما به اندازه یک اپسیلون از 1درجه بیشتر شود، کمپرسور را استارت میکند، در این حالت دما شروع به کاهش میکند و به محض اینکه به 1 درجه برسد کمپرسور خاموش میشود. خب حالا فرض کنید که به خاطر نشتی گرما و باز و بسته شدن در یخچال بخواهد این سیکل مرتبا تکرار شود ، نتیجه چه میشود؟ کمپرسور یخچال پس از مدتی به شدت فرسوده و حتی تخریب میشود.
برای اینکه در این نوع کنترل فرایند مرتبا تحت شوک قرار نگیرد باید یک بازه مرده تعریف کرد. مثلا میخوایم دما روی 1 درجه باشد ولی بازه تعریفی باید بین 1- و 3 باشد. با این کار تعداد دفعات خاموش روشن شدن کمپرسور خیلی کمتر میشود.
در زیر خروجی کنترل کننده و رفتار فرایند را مشاهده میکنید :
همونطور که از نمودار رفتار فرایند پیداست ، این نوع کنترل کننده نمیتواند خروجی را در یک وضعیت ثابت نگه دارد و خروجی دائما بین دو محدوده مشخص نوسان میکند ، پس هیچوقت خطا 0 نمیشود!
یکی دیگر از مشکلات این سیستم این است که خروجی به سرعت به مقدار مطلوب میرسد ولی در همان مقدار ثابت نمی ماند ، چرا که در این حالت فرمان کنترل دوباره تغییر میکند و خروجی فرایند شروع به کاهش میکند تا دوباره سیگنال کنترلی قوی اعمال شود.
اگر به خروجی کنترل کننده نگاه کنید متوجه میشوید که خروجی این نوع کنترلر پیوسته نیست یعنی تابع عملکرد پیوسته ای ندارد و با تغییر بسیار کوچکی در خطا ، خروجی تغییر شدیدی پیدا میکند. ، از این جهت در بسیاری از کاربردهای کنترلی قابل اجرا نیست و فقط در کاربردهای ساده مثل یخچال ، برخی کوره ها (و امثال آن در کاربردهای خانگی و صنعت) استفاده میشود.
- پیوستها
-
- Asset 11.png
- (44.11 KiB) هنوز دانلود نشده
-
- Asset 10.png
- (30.94 KiB) هنوز دانلود نشده
-
- Asset 9.png
- (33.63 KiB) هنوز دانلود نشده
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
کنترلر تناسبی ( Proportional Controller )
در کنترل کننده تناسبی سیگنال کنترل بر اساس ضرب سیگنال خطا در یک مقدار ثابت بدست می آید. پس فرمان کنترل بدین صورت تعریف می شود :

بنابراین تابع تبدیل D(s) که در پست های قبل در مورد آن توضیح داده شد ، مقدار ثابت را دارد که در مقدار خطا ضرب شده و فرمان کنترل را می سازد. البته مقدار میتواند تغییر کند.
برای اینکه درک بهتری از این نوع کنترل کننده داشته باشید جدول زیر را در نظر بگیرید :

جدول بالا یک ایده ابتدایی از رفتار یک کنترلر تناسبی است. در این کنترلر ضریب ثابت ، 5 در نظر گرفته شده است.
در جدول بالا t ، زمان نمونه گیری از خروجی ، r مقدار مطلوب ، e ، میزان خطا ، y خروجی و در نهایت U ، خروجی کنترل کننده یا همان سیگنال فرمان است.
واضح است که در جدول بالا قویترین فرمان کنترل هنگامی است که خطا بیشترین مقدار را دارد یعنی u(t)=50 و ضعیف ترین فرمان کنترل هم به حالتی مربوط است که خطا کمترین مقدار یعنی 0 را دارد که در این حالت u(t)=0 .
اگر به جدول دقت کنید یک فلش با نام No Control وجود دارد.شاید از این حالت بتوان به عنوان یک عیب از کنترلر تناسبی نام برد چرا که در حالت هایی مثل خطای 0 خروجی کنترل کننده 0 است یعنی هیچ کنترلی بر روی سیستم یا فرایند وجود ندارد و فرایند به حال خود رها می شود!. پس طبیعتا سیستم در این وضع باقی نمی ماند و شروع به به فاصله گرفتن از از مقدار r (10) خواهد کرد.پس در این حالت مقدار خروجی 8 (y=8) می شود و بر اساس این تغییر در خروجی مقدار خطا دوباره مقدار جدیدی (e=2) میگیرد و کنترلر بر اساس این مقدار خطا سیگنال کنترلی K*e که برابر با 5*2 می شود را اعمال میکند تا دوباره سیستم را به هدف کنترلی نزدیک سازد. اینکه در چه نقطه ای سیستم به وضعیت تعادل میرسد قابل تشخیص نیست و به ماهیت سیستم بستگی دارد.
نتیجه آن که در سیستم کنترلر تناسبی نمیتوان به نقطه مطلوب رسید و خروجی پس از مدتی ، نزدیک نقطه تنظیم به حال نوسان در خواهد آمد (چون وقتی به نقطه تنظیم میرسد کنترل از دست میرود و سیستم به حال خود رها می شود تا دوباره مقداری خطا به وجود آید و بر اساس آن فرمان کنترلی جدید صادر شود).
پس : کنترلر تناسبی یا P فقط بر اساس وضعیت جاری سیستم (وضعیت جاری سیگنال خطا) عمل میکند.
برای درک اینکه چگونه کنترلر تناسبی می تواند قطب های سیستم را تغییر دهد به مثال زیر توجه کنید:
مثال :
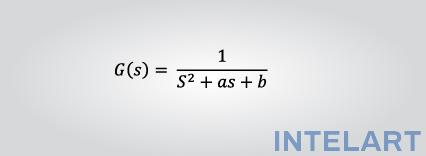
فرض کنید یک تابع تبدیل فرایند را به صورت اختیاری و درجه 2 فرض کرده ایم :
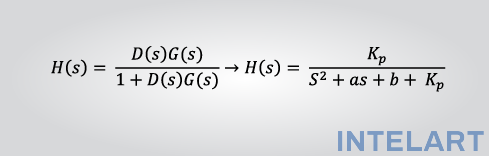
سپس با کنترلر تناسبی ، تابع تبدیل سیستم حلقه بسته بصورت زیر خواهد شد :
معادله مشخصه (Characteristic equation) این سیستم به صورت زیر تعریف می شود :
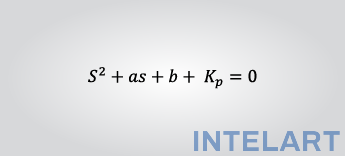
ریشه های این معادله قطب های حلقه بسته سیستم هستند و لذا داریم :

خب اکنون به راحتی می توانیم مقدار مناسبی را برای Kp بدست آوریم. چطور؟
کافی است که مقدار به نحوی انتخاب شود که قطب های سیستم حلقه بسته سیستم در سمت چپ صفحه فرکانس مختلط s قرار گیرند تا از پایداری سیستم اطمینان حاصل کنیم.
بنابراین تابع تبدیل D(s) که در پست های قبل در مورد آن توضیح داده شد ، مقدار ثابت را دارد که در مقدار خطا ضرب شده و فرمان کنترل را می سازد. البته مقدار میتواند تغییر کند.
برای اینکه درک بهتری از این نوع کنترل کننده داشته باشید جدول زیر را در نظر بگیرید :
جدول بالا یک ایده ابتدایی از رفتار یک کنترلر تناسبی است. در این کنترلر ضریب ثابت ، 5 در نظر گرفته شده است.
در جدول بالا t ، زمان نمونه گیری از خروجی ، r مقدار مطلوب ، e ، میزان خطا ، y خروجی و در نهایت U ، خروجی کنترل کننده یا همان سیگنال فرمان است.
واضح است که در جدول بالا قویترین فرمان کنترل هنگامی است که خطا بیشترین مقدار را دارد یعنی u(t)=50 و ضعیف ترین فرمان کنترل هم به حالتی مربوط است که خطا کمترین مقدار یعنی 0 را دارد که در این حالت u(t)=0 .
اگر به جدول دقت کنید یک فلش با نام No Control وجود دارد.شاید از این حالت بتوان به عنوان یک عیب از کنترلر تناسبی نام برد چرا که در حالت هایی مثل خطای 0 خروجی کنترل کننده 0 است یعنی هیچ کنترلی بر روی سیستم یا فرایند وجود ندارد و فرایند به حال خود رها می شود!. پس طبیعتا سیستم در این وضع باقی نمی ماند و شروع به به فاصله گرفتن از از مقدار r (10) خواهد کرد.پس در این حالت مقدار خروجی 8 (y=8) می شود و بر اساس این تغییر در خروجی مقدار خطا دوباره مقدار جدیدی (e=2) میگیرد و کنترلر بر اساس این مقدار خطا سیگنال کنترلی K*e که برابر با 5*2 می شود را اعمال میکند تا دوباره سیستم را به هدف کنترلی نزدیک سازد. اینکه در چه نقطه ای سیستم به وضعیت تعادل میرسد قابل تشخیص نیست و به ماهیت سیستم بستگی دارد.
نتیجه آن که در سیستم کنترلر تناسبی نمیتوان به نقطه مطلوب رسید و خروجی پس از مدتی ، نزدیک نقطه تنظیم به حال نوسان در خواهد آمد (چون وقتی به نقطه تنظیم میرسد کنترل از دست میرود و سیستم به حال خود رها می شود تا دوباره مقداری خطا به وجود آید و بر اساس آن فرمان کنترلی جدید صادر شود).
پس : کنترلر تناسبی یا P فقط بر اساس وضعیت جاری سیستم (وضعیت جاری سیگنال خطا) عمل میکند.
برای درک اینکه چگونه کنترلر تناسبی می تواند قطب های سیستم را تغییر دهد به مثال زیر توجه کنید:
مثال :
فرض کنید یک تابع تبدیل فرایند را به صورت اختیاری و درجه 2 فرض کرده ایم :
سپس با کنترلر تناسبی ، تابع تبدیل سیستم حلقه بسته بصورت زیر خواهد شد :
معادله مشخصه (Characteristic equation) این سیستم به صورت زیر تعریف می شود :
ریشه های این معادله قطب های حلقه بسته سیستم هستند و لذا داریم :
خب اکنون به راحتی می توانیم مقدار مناسبی را برای Kp بدست آوریم. چطور؟
کافی است که مقدار به نحوی انتخاب شود که قطب های سیستم حلقه بسته سیستم در سمت چپ صفحه فرکانس مختلط s قرار گیرند تا از پایداری سیستم اطمینان حاصل کنیم.
- پیوستها
-
- Asset 16.png
- (18.13 KiB) هنوز دانلود نشده
-
- Asset 15.png
- (16.72 KiB) هنوز دانلود نشده
-
- Asset 14.png
- (24.84 KiB) هنوز دانلود نشده
-
- Asset 13.png
- (18.63 KiB) هنوز دانلود نشده
-
- Asset 12.png
- (28.57 KiB) هنوز دانلود نشده
-
- Capture.PNG
- (685 بایت) هنوز دانلود نشده
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
کنترل کننده انتگرالی (Integrally Controller)
کنترلر انتگرالی معادله ای به فرم زیر دارد :
در رابطه زیر Ti زمان انتگرال گیری (Reset Time ) نامیده میشود.به معکوس آن Reset Rate گفته می شود.
خب اگر به رابطه این کنترلر دقت کنید میبینید که خروجی آن ، ضریبی از مجموع خطا از زمان گذشته تا به حال است
به زبان ساده تر این کنترل کننده در هر مرحله خطا را با مرحله قبل جمع میکند و آن را در یک ضریب که در ادامه توضیح میدم ضرب میکند.
آن ضریب همان Ki هست که از تقسیم ضریب تناسبی بر زمان انتگرالگیری بدست می آید :

اگر دقت کنید یک تفاوت برجسته بین این کنترلر و کنترلر تناسبی هست ، اینکه هیچ گاه فرمان صادر شده توسط این کنترلر در زمان صفر شدن خطا ، صفر نمیشود .به خاطر بیاورید که در کنترلر تناسبی هنگامی که خطا صفر میشد خروجی کنترلر هم صفر میشد که این یک عیب به شمار میرود اما در این کنترل کننده خروجی از جمع مساحت زیر منحنی خطا بدست می آید(کنترلر انتگرال گیری میکند). خب واضح هست که این سطح در ابتدای شروع کار کنترلر صفر هست و با گذشت زمان افزایش پیدا میکند ، پس حتی اگر خطا صفر بشود باز هم این سطح یک مقدار محدود رو به خودش اختصاص میدهد و آنقدر تغییرات را اعمال میکند تا زمانی که خروجی به مقدار مطلوب برسد و خطا صفر بشود. پس این کنترلر میتواند خطای حالت ماندگار را صفر کند و در همان وضعیت ادامه بدهد.

پس نتیجه ای که میتوان گرفت :
کنترلر انتگرالی بر اساس وضعیت قبلی تا به حال ، یا به عبارتی تاریخچه خطا ، فرمان کنترل را صادر میکند و نه صرفا بر اساس وضعیت جاری یا آینده خطا!
توجه: کنترلر انتگرالی میتواند کارایی سیستم کنترل را بهتر کند و به رسیدن متغیر خروجی به مقدار مطلوب کمک کند ولی در عوض باعث میشود که پایداری نسبی سیستم تضعیف شود. چرا؟ جوابدر تغییرات مکان قطب و صفر سیستم هست که توی پست قبل توضیح داده شد. اگر جواب این سوال را پیدا کنید ، مفهوم این نوع کنترلر رو پیدا کرده اید.
در رابطه زیر Ti زمان انتگرال گیری (Reset Time ) نامیده میشود.به معکوس آن Reset Rate گفته می شود.
خب اگر به رابطه این کنترلر دقت کنید میبینید که خروجی آن ، ضریبی از مجموع خطا از زمان گذشته تا به حال است
به زبان ساده تر این کنترل کننده در هر مرحله خطا را با مرحله قبل جمع میکند و آن را در یک ضریب که در ادامه توضیح میدم ضرب میکند.
آن ضریب همان Ki هست که از تقسیم ضریب تناسبی بر زمان انتگرالگیری بدست می آید :
اگر دقت کنید یک تفاوت برجسته بین این کنترلر و کنترلر تناسبی هست ، اینکه هیچ گاه فرمان صادر شده توسط این کنترلر در زمان صفر شدن خطا ، صفر نمیشود .به خاطر بیاورید که در کنترلر تناسبی هنگامی که خطا صفر میشد خروجی کنترلر هم صفر میشد که این یک عیب به شمار میرود اما در این کنترل کننده خروجی از جمع مساحت زیر منحنی خطا بدست می آید(کنترلر انتگرال گیری میکند). خب واضح هست که این سطح در ابتدای شروع کار کنترلر صفر هست و با گذشت زمان افزایش پیدا میکند ، پس حتی اگر خطا صفر بشود باز هم این سطح یک مقدار محدود رو به خودش اختصاص میدهد و آنقدر تغییرات را اعمال میکند تا زمانی که خروجی به مقدار مطلوب برسد و خطا صفر بشود. پس این کنترلر میتواند خطای حالت ماندگار را صفر کند و در همان وضعیت ادامه بدهد.
پس نتیجه ای که میتوان گرفت :
کنترلر انتگرالی بر اساس وضعیت قبلی تا به حال ، یا به عبارتی تاریخچه خطا ، فرمان کنترل را صادر میکند و نه صرفا بر اساس وضعیت جاری یا آینده خطا!
توجه: کنترلر انتگرالی میتواند کارایی سیستم کنترل را بهتر کند و به رسیدن متغیر خروجی به مقدار مطلوب کمک کند ولی در عوض باعث میشود که پایداری نسبی سیستم تضعیف شود. چرا؟ جوابدر تغییرات مکان قطب و صفر سیستم هست که توی پست قبل توضیح داده شد. اگر جواب این سوال را پیدا کنید ، مفهوم این نوع کنترلر رو پیدا کرده اید.
- پیوستها
-
- Asset 17.png
- (44.29 KiB) هنوز دانلود نشده
-
- Capture.PNG
- (586 بایت) هنوز دانلود نشده
-
- Capture.PNG
- (1 KiB) هنوز دانلود نشده
-
mahdi.faani
- مدیر انجمن
- پست: 99
- تاریخ عضویت: 14 می 2023, 14:39
- محل اقامت: Tehran
- تماس:
کنترل کننده مشتق گیر (Derivative Controller)
تا الان دو بلوک تشکیل دهنده کنترلر PID را مرور کردیم. میرسیم به بلوک سوم و آخر
این کنترلر معادله ای شبیه به معادله زیر دارد:
چرا از واژه شبیه استفاده شد؟
چون اگر این معادله را به حوزه لاپلاس ببریم تابع تبدیلی مساوی با : D=s*Kd دارد. اما در عمل ساختن مداری با چنین معاده مشخصه ای امکان پذیر نیست.
با مراجعه به مفاهیم کنترل خطی در می یابیم که چنین سیستمی علّی (Casual) نیست پس در نتیجه قابل ساخت به صورت عملی هم نیست و فقط روی کاغذ ابلیت تعریف دارد!
ابتدا در مورد تئوری و در نهایت سراغ مدار عملی این کنترلر میرویم.
نکته: اطلاع از تبدیل لاپلاس خیلی به فهم مطالب کمک میکند.به همین خاطر از معادلات لاپلاس در بیان مطالب استفاده شده است.
در تئوری میبینیم که خروجی سیستم برابر حاصل ضرب یک عدد ثابت در مشتق سیگنال خطا هست. عدد ثابت از ضرب Kp در Td بدست می آید:
Kd=Kp*Td
Td در واقع زمان مشتق گیری هست. این پارامتر در طراحی کنترلر PID استفاده میشود.
اصول کار: این کنترلر ابتدا از سیگنال خطا مشتق میگیرد یعنی در واقع جهت گیری خطا را تشخیض میدهد. سپس آن رو در یک گین (Gain) ضرب میکند (تقویت یا تضعیف) و آن را به سیستم اعمال میکند. خب یعنی چه؟ یعنی اینکه اگر خطای سیستم در حال افزایش باشد ، مثلا یک موتور الکتریکی دارد یک سیستم را درایو میکند، بار روی موتور در حال افزایش هست (به هر طریقی) این یعنی اینکه خطای ورودی به کنترل کننده در حال افزایش است چراکه وقتی بار روی موتور زیاد شود سرعت موتور کمتر میشود و خطای سیستم (که برابر بار مقدار مطلوب منهای مقدار خروجی هست) افزایش پیدا میکند. خب تا اینجا متوجه شدیم که چطور افزایش یا کاهش خطا را پیدا کنیم.
بعد از پیدا کردن شیب تغییرات خطا ، مقدار آن را در یک گین (که مقدارش را ما باید تعیین کنیم) ضرب کرده و به سیستم اعمال میکند.
مثال: فرض کنید که موتور در حال کار است. و بار اعمالی به موتور زیاد میشود. با افزایش بار موتور، خطا هم زیاد میشود در نتیجه به علت تغییرات مثبت خطا ، مشتق خطا هم مقداری مثبت پیدا میکند. با ضرب این مقدار مثبت در یک عدد و اعمال آن به سیستم، به کاهش روند کندتر شدن سرعت موتور کمک میکنیم. یعنی اینکه یک سیگنال کنترلی از روی تغییرات خطا تولید میکنیم و در واقع با نوعی پیش بینی روند سیستم به بهبود کنترل سیستم کمک میکنیم!
حالا فرض کنید که بار اعمالی به موتور کم شود. سرعت موتور افزایش پیدا میکند. در نتیجه خطا منفی میشود (چرا؟) . در نتیجه مشتق خطا مقداری منفی پیدا میکند. پس در نهایت سیگنال کنترلی از کنترلر مشتق گیر مقداری منفی خواهد داشت. با اعمال این سیگنال منفی به سیستم در واقع ولتاژ اعمالی به موتور را کم میکنیم تا سرعت موتور کم شود.
جمع بندی:
کنترلر مشتق گیر یا D یکی از بلوک های سازنده PID است و بر اساس جهت گیری آینده خطا تصمیم گیری میکند و در واقع بر اساس نوعی پیش بینی از آینده عمل میکند.
یادآوری: کنترلر تناسبی بر اساس وضعیت فعلی خطا و کنترلر انتگرالی بر اساس وضعیت گذشته خطا تصمیم گیری میکنند .
کنترلر مشتق گیر به نظر کنترلر جالبی می آید اما باید در استفاده از آن به شدت احتیاط کرد. بنا به دلایل زیر:
1-اگر در سیستم نویز وجود داشته باشد استفاده از این کنترلر موجب تولید خروجی های نامناسب در خروجی خواهد شد (چرا؟؟)
2- در مواردی که تغییراتی در خطا وجود ندارد این کنترلر هیچ کارایی ندارد.
این کنترلر معادله ای شبیه به معادله زیر دارد:
چرا از واژه شبیه استفاده شد؟
چون اگر این معادله را به حوزه لاپلاس ببریم تابع تبدیلی مساوی با : D=s*Kd دارد. اما در عمل ساختن مداری با چنین معاده مشخصه ای امکان پذیر نیست.
با مراجعه به مفاهیم کنترل خطی در می یابیم که چنین سیستمی علّی (Casual) نیست پس در نتیجه قابل ساخت به صورت عملی هم نیست و فقط روی کاغذ ابلیت تعریف دارد!
ابتدا در مورد تئوری و در نهایت سراغ مدار عملی این کنترلر میرویم.
نکته: اطلاع از تبدیل لاپلاس خیلی به فهم مطالب کمک میکند.به همین خاطر از معادلات لاپلاس در بیان مطالب استفاده شده است.
در تئوری میبینیم که خروجی سیستم برابر حاصل ضرب یک عدد ثابت در مشتق سیگنال خطا هست. عدد ثابت از ضرب Kp در Td بدست می آید:
Kd=Kp*Td
Td در واقع زمان مشتق گیری هست. این پارامتر در طراحی کنترلر PID استفاده میشود.
اصول کار: این کنترلر ابتدا از سیگنال خطا مشتق میگیرد یعنی در واقع جهت گیری خطا را تشخیض میدهد. سپس آن رو در یک گین (Gain) ضرب میکند (تقویت یا تضعیف) و آن را به سیستم اعمال میکند. خب یعنی چه؟ یعنی اینکه اگر خطای سیستم در حال افزایش باشد ، مثلا یک موتور الکتریکی دارد یک سیستم را درایو میکند، بار روی موتور در حال افزایش هست (به هر طریقی) این یعنی اینکه خطای ورودی به کنترل کننده در حال افزایش است چراکه وقتی بار روی موتور زیاد شود سرعت موتور کمتر میشود و خطای سیستم (که برابر بار مقدار مطلوب منهای مقدار خروجی هست) افزایش پیدا میکند. خب تا اینجا متوجه شدیم که چطور افزایش یا کاهش خطا را پیدا کنیم.
بعد از پیدا کردن شیب تغییرات خطا ، مقدار آن را در یک گین (که مقدارش را ما باید تعیین کنیم) ضرب کرده و به سیستم اعمال میکند.
مثال: فرض کنید که موتور در حال کار است. و بار اعمالی به موتور زیاد میشود. با افزایش بار موتور، خطا هم زیاد میشود در نتیجه به علت تغییرات مثبت خطا ، مشتق خطا هم مقداری مثبت پیدا میکند. با ضرب این مقدار مثبت در یک عدد و اعمال آن به سیستم، به کاهش روند کندتر شدن سرعت موتور کمک میکنیم. یعنی اینکه یک سیگنال کنترلی از روی تغییرات خطا تولید میکنیم و در واقع با نوعی پیش بینی روند سیستم به بهبود کنترل سیستم کمک میکنیم!
حالا فرض کنید که بار اعمالی به موتور کم شود. سرعت موتور افزایش پیدا میکند. در نتیجه خطا منفی میشود (چرا؟) . در نتیجه مشتق خطا مقداری منفی پیدا میکند. پس در نهایت سیگنال کنترلی از کنترلر مشتق گیر مقداری منفی خواهد داشت. با اعمال این سیگنال منفی به سیستم در واقع ولتاژ اعمالی به موتور را کم میکنیم تا سرعت موتور کم شود.
جمع بندی:
کنترلر مشتق گیر یا D یکی از بلوک های سازنده PID است و بر اساس جهت گیری آینده خطا تصمیم گیری میکند و در واقع بر اساس نوعی پیش بینی از آینده عمل میکند.
یادآوری: کنترلر تناسبی بر اساس وضعیت فعلی خطا و کنترلر انتگرالی بر اساس وضعیت گذشته خطا تصمیم گیری میکنند .
کنترلر مشتق گیر به نظر کنترلر جالبی می آید اما باید در استفاده از آن به شدت احتیاط کرد. بنا به دلایل زیر:
1-اگر در سیستم نویز وجود داشته باشد استفاده از این کنترلر موجب تولید خروجی های نامناسب در خروجی خواهد شد (چرا؟؟)
2- در مواردی که تغییراتی در خطا وجود ندارد این کنترلر هیچ کارایی ندارد.
- پیوستها
-
- Capture.PNG
- (907 بایت) هنوز دانلود نشده